
You are looking for information, articles, knowledge about the topic nail salons open on sunday near me pid 제어 코드 on Google, you do not find the information you need! Here are the best content compiled and compiled by the https://chewathai27.com/to team, along with other related topics such as: pid 제어 코드 파이썬 PID 제어 코드, DC 모터 PID 제어 소스, 아두이노 DC 모터 PID 제어, pid제어 알고리즘, PID 제어 예시, PLC/PID 제어, pid제어 실생활, PID 제어 구현
PID 제어 : 이론, 코딩 및 파라미터 튜닝 방법 : 네이버 블로그
- Article author: m.blog.naver.com
- Reviews from users: 19646
 Ratings
Ratings - Top rated: 4.0
- Lowest rated: 1
- Summary of article content: Articles about PID 제어 : 이론, 코딩 및 파라미터 튜닝 방법 : 네이버 블로그 물 온도 제어부터 드론 자세제어까지 제어에 필요한 가장 기본인 PID 제어를 … 코드로 표현하면 이렇다. … PITCH축을 예로 P제어 소스를 짜보자면. …
- Most searched keywords: Whether you are looking for PID 제어 : 이론, 코딩 및 파라미터 튜닝 방법 : 네이버 블로그 물 온도 제어부터 드론 자세제어까지 제어에 필요한 가장 기본인 PID 제어를 … 코드로 표현하면 이렇다. … PITCH축을 예로 P제어 소스를 짜보자면.
- Table of Contents:
카테고리 이동
앤아버
이 블로그
공부방
카테고리 글
카테고리
이 블로그
공부방
카테고리 글

드론 DIY | 아두이노 PID 제어 코드 (코드 첨부)
- Article author: hyongdoc.tistory.com
- Reviews from users: 3419 Ratings
- Top rated: 3.5
- Lowest rated: 1
- Summary of article content: Articles about 드론 DIY | 아두이노 PID 제어 코드 (코드 첨부) 지난 포스팅에서 PID의 원리가 뭔지, 대체 왜 필요한지에 대해 구구절절 설명했다. 따라서 이번 포스팅에서는 사실 가장 중요한? 아두이노 코드에 … …
- Most searched keywords: Whether you are looking for 드론 DIY | 아두이노 PID 제어 코드 (코드 첨부) 지난 포스팅에서 PID의 원리가 뭔지, 대체 왜 필요한지에 대해 구구절절 설명했다. 따라서 이번 포스팅에서는 사실 가장 중요한? 아두이노 코드에 … 지난 포스팅에서 PID의 원리가 뭔지, 대체 왜 필요한지에 대해 구구절절 설명했다. 따라서 이번 포스팅에서는 사실 가장 중요한? 아두이노 코드에 대해 쓰려고 한다. 서술하기에 앞서, 아두이노라는 녀석이 어떻게..
- Table of Contents:
태그
관련글
댓글111
광고
공지사항
최근글
인기글
최근댓글
태그
전체 방문자
티스토리툴바
PID 제어와 아두이노 예제 코드 | Hard Copy World
- Article author: www.hardcopyworld.com
- Reviews from users: 40625 Ratings
- Top rated: 4.7
- Lowest rated: 1
- Summary of article content: Articles about PID 제어와 아두이노 예제 코드 | Hard Copy World 자동제어 방식 가운데서 가장 흔히 이용되는 제어방식으로 PID 제어라는 방식이 있다. 이 PID란,. P: Proportinal(비례) I: Integral(적분) …
- Most searched keywords: Whether you are looking for PID 제어와 아두이노 예제 코드 | Hard Copy World 자동제어 방식 가운데서 가장 흔히 이용되는 제어방식으로 PID 제어라는 방식이 있다. 이 PID란,. P: Proportinal(비례) I: Integral(적분) PID 제어를 쓸 일이 생길수 있을 것 같아서 자료를 정리중입니다. 어차피 저도 이론적인 내용을 상세히 알지는 못하므로… 이론을 쉽게 정리하고 아두이노 코드로 옮기는 작업을 해야죠. 정리되는대로 이 페이지는 업데이트 됩니다. [출처] PID제어란!!|작성자 화이팅 1. PID 제어란? 자동제어 방식 가운데서 가장 흔히 이용되는 제어방식으로 PID 제어라는 방식이 있다. 이 PID란, P: Proportinal(비례) I: Integral(적분) D: Differential(미분) 의 3가지 조합으로 제어하는 것으로 유연한 […]
- Table of Contents:

PID 제어기 알고리즘을 코드로 표현
- Article author: lovely-embedded.tistory.com
- Reviews from users: 48705 Ratings
- Top rated: 4.7
- Lowest rated: 1
- Summary of article content: Articles about PID 제어기 알고리즘을 코드로 표현 대덕소프트웨어마이스터고 재학생입니다. 드론 개발, MCU 제어에 대한 관심이 제일 많습니다. …
- Most searched keywords: Whether you are looking for PID 제어기 알고리즘을 코드로 표현 대덕소프트웨어마이스터고 재학생입니다. 드론 개발, MCU 제어에 대한 관심이 제일 많습니다. 표준 PID 제어기 알고리즘은 다음과 같습니다. 이 알고리즘을 코드로 간단하게 표현하자면 다음과 같습니다. Error = Setpoint – Input; PTerm = Kp * Error; ITerm += Ki * Error * dt; 현재 오차(Error)는 설정(..
- Table of Contents:
8-2. Arduino Car로 PID 제어
- Article author: kingpodo.tistory.com
- Reviews from users: 30551 Ratings
- Top rated: 4.7
- Lowest rated: 1
- Summary of article content: Articles about 8-2. Arduino Car로 PID 제어 PID 제어 Cruise System구현에 들어가에기 전에 전에 작성한 글에서는 PID 제어를 사용하지 않은 … 아래 소스코드는 PID Control의 샘플코드입니다. …
- Most searched keywords: Whether you are looking for 8-2. Arduino Car로 PID 제어 PID 제어 Cruise System구현에 들어가에기 전에 전에 작성한 글에서는 PID 제어를 사용하지 않은 … 아래 소스코드는 PID Control의 샘플코드입니다. 1. PID 제어 Cruise System구현에 들어가에기 전에 전에 작성한 글에서는 PID 제어를 사용하지 않은 Cruise System을 구현하였고 그것에 문제점에 대하여 이야기했습니다. 아무런 지식이 없는 상태에서 바로 이글..그래, 우린 반드시 성공한다.
- Table of Contents:
프로토타이핑 – 12. 아두이노 PID 튜토리얼 + PID제어기(wiki) :: 집밖은 위험해
- Article author: throwexception.tistory.com
- Reviews from users: 1815 Ratings
- Top rated: 3.4
- Lowest rated: 1
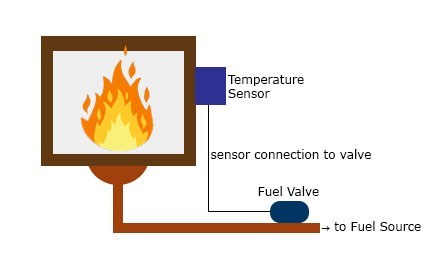
- Summary of article content: Articles about 프로토타이핑 – 12. 아두이노 PID 튜토리얼 + PID제어기(wiki) :: 집밖은 위험해 가장 유명한 제어기중 하나는 PID 제어기로 비례, 적분, … 난로의 불을 제어하는 예제로 한번 배워보겠습니다. … 코드로 PID 제어하기. …
- Most searched keywords: Whether you are looking for 프로토타이핑 – 12. 아두이노 PID 튜토리얼 + PID제어기(wiki) :: 집밖은 위험해 가장 유명한 제어기중 하나는 PID 제어기로 비례, 적분, … 난로의 불을 제어하는 예제로 한번 배워보겠습니다. … 코드로 PID 제어하기. https://www.teachmemicro.com/arduino-pid-control-tutorial https://ko.m.wikipedia.org/wiki/PID_%EC%A0%9C%EC%96%B4%EA%B8%B0 제어 시스템에서 제어기는 시스템의 출력이 목표 입력값이 되도록 고쳐나가야..집밖은 위험해OTL
- Table of Contents:
프로토타이핑 – 12 아두이노 PID 튜토리얼 + PID제어기(wiki)
티스토리툴바
엔코더 모터 제어 (3. PID 제어로 속도 제어 [PID 함수들 만들기 Part 01])
- Article author: pkr7098.tistory.com
- Reviews from users: 49519 Ratings
- Top rated: 3.7
- Lowest rated: 1
- Summary of article content: Articles about 엔코더 모터 제어 (3. PID 제어로 속도 제어 [PID 함수들 만들기 Part 01]) 피드백 제어는 이러한 방식으로 동작되며, 이번 장에서는 PID 제어를 통해 모터의 속도를 … 위의 개념들을 코드로 표현하면 변수에 해당합니다. …
- Most searched keywords: Whether you are looking for 엔코더 모터 제어 (3. PID 제어로 속도 제어 [PID 함수들 만들기 Part 01]) 피드백 제어는 이러한 방식으로 동작되며, 이번 장에서는 PID 제어를 통해 모터의 속도를 … 위의 개념들을 코드로 표현하면 변수에 해당합니다. 관련글 엔코더 모터 제어 (0. 소개) (tistory.com) 엔코더 모터 제어 (1. 펄스및 위치 측정) (tistory.com) 엔코더 모터 제어 (2. 속도 계산) (tistory.com) 서론 엔코더 모터는 위치 제어뿐만 아니라 속도제어도..
- Table of Contents:
관련글
서론
PID 제어
결과 영상
Continue
태그
stm32실전 Related Posts
티스토리툴바
![엔코더 모터 제어 (3. PID 제어로 속도 제어 [PID 함수들 만들기 Part 01])](https://img1.daumcdn.net/thumb/R800x0/?scode=mtistory2&fname=https%3A%2F%2Fblog.kakaocdn.net%2Fdn%2FmiKdY%2Fbtq1C2WKopQ%2FRneAYNMXlNrO8ogC5dbKa0%2Fimg.png)
Arduino uno, PID control, 아두이노 우노 PID 제어 라이브러리 활용
- Article author: setoo0922.tistory.com
- Reviews from users: 32882 Ratings
- Top rated: 4.6
- Lowest rated: 1
- Summary of article content: Articles about Arduino uno, PID control, 아두이노 우노 PID 제어 라이브러리 활용 PID 제어 코드 분석 · Input 들어온 값을 곧이 곧대로 Setpoint와 비교하는 라이브러리 코드인지, · 아니면 인풋 값인 0 ~ 1023을 특정 비율로 줄이거나 … …
- Most searched keywords: Whether you are looking for Arduino uno, PID control, 아두이노 우노 PID 제어 라이브러리 활용 PID 제어 코드 분석 · Input 들어온 값을 곧이 곧대로 Setpoint와 비교하는 라이브러리 코드인지, · 아니면 인풋 값인 0 ~ 1023을 특정 비율로 줄이거나 … – PID (proportional integral derivative control) control – PID 제어 라이브러리 다운 – PID 제어 코드 분석 PID (proportional integral derivative control) control 2020/09/20 – [정리, 공부해요/전기,..
- Table of Contents:
우선 Input값을 쉽게 바꿔주기 위해 가변저항 연결
화질이 별로지만 위의 궁금증 해결
태그
관련글
댓글0
공지사항
최근글
인기글
최근댓글
티스토리툴바
Daddy Makers: 자율제어를 위한 PID 제어 개념 및 개발 방법
- Article author: daddynkidsmakers.blogspot.com
- Reviews from users: 10593 Ratings
- Top rated: 3.6
- Lowest rated: 1
- Summary of article content: Articles about Daddy Makers: 자율제어를 위한 PID 제어 개념 및 개발 방법 PID제어는 자연스럽게 목표 물리량(속도, 방향, 온도 센서값 등)으로 수렴시킨다. … PID를 계산하는 소스코드는 다음과 같다. …
- Most searched keywords: Whether you are looking for Daddy Makers: 자율제어를 위한 PID 제어 개념 및 개발 방법 PID제어는 자연스럽게 목표 물리량(속도, 방향, 온도 센서값 등)으로 수렴시킨다. … PID를 계산하는 소스코드는 다음과 같다.
- Table of Contents:
2015년 9월 4일 금요일
프로필
추천 게시물
Daddy Makers
전체 페이지뷰
팔로어
구독
블로그 보관함
태그
가장 많이 본 글

See more articles in the same category here: Chewathai27.com/to/blog.
드론 DIY | 아두이노 PID 제어 코드 (코드 첨부)
지난 포스팅에서 PID의 원리가 뭔지, 대체 왜 필요한지에 대해 구구절절 설명했다.
따라서 이번 포스팅에서는 사실 가장 중요한? 아두이노 코드에 대해 쓰려고 한다.
서술하기에 앞서, 아두이노라는 녀석이 어떻게 동작하는지 알 필요가 있다. 이미 C언어를 어느정도 아는 사람이라면 척보면 다 알지만, 코딩을 처음 해보는 사람들에게는 매우 생소할 것이므로!
처음 C를 배우는 사람도 할 수 있게끔 설명하고자 한다.
1. 아두이노 코딩을 위해 반드시 알아야할 팩트들
아두이노 IDE를 먼저 받아야하는데, 그건 지난 포스팅에 있으므로!
오늘은 바로 코딩을 보도록 하겠다.
아두이노 IDE를 실행시키면 다음과 같은 문구들이 뜬다.
void setup() { // put your setup code here, to run once:
}
void loop() { // put your main code here, to run repeatedly:
}
void가 뭔지, setup은 뭔지, loop는 뭔지 ()는 뭐고 {}는 뭔지. 아마 처음하는 사람이라면 아무것도 모를 것이다. 그런데 모든 걸 다 알아야 코딩을 할 수 있는게 아니다. 코딩이 뭔가? 알고리즘아닌가? 결국 아두이노 드론을 만드는데 있어서 가장 중요한건 알고리즘이다!
C언어(컴퓨터 프로그래밍 언어)라는 건 결국 우리가 생각한 알고리즘을 언어적으로 풀어주는 데 필요할 뿐, 알고리즘 자체가 될 수는 없기 때문이다.
고로 알고리즘을 짜고, 그 알고리즘을 코딩으로 적용할 줄만 알면 된다. 물론 엄밀히 말하면 프로그래밍 언어에 대한 지식이 있어야 응답속도와 반응성 등과 같은 정밀한 곳에서 더 이점을 가질 수 있겠지만.. 흔히 만드는 아두이노 드론 정도는 딱히 몰라도 가능하다. 고로 시작해보자.
아두이노는 크게 2부분으로 나뉘어져 있다.
void setup, void loop 가 바로 그것이다.
먼저 셋업 부분은 뭘까?
void setup() {
// put your setup code here, to run once:
}
친절하게 아두이노에서 설명해주고 있다. PUT YOUR SETUP CODE HERE, TO RUN ONCE:
즉, 딱 한번만 실행될 코드를 setup 부분에 채워넣으라는 것이다.
void loop() {
// put your main code here, to run repeatedly:
}
다음은 루프 부분. PUT YOUR MAIN CODE HERE, TO RUN REPEATEDLY:
즉, 루프 안에 들어가 있는 코드는 리피트!! 반복된다. 아두이노에 업로드하는 순간부터 영원히 반복된다. loop 안에 있는 건 그냥 영원히~~~ 위에서부터 아래로 코드가 실행되게 되는 것이다. setup은 위에서부터 아래로 한차례 실행되고 마는 부분이고, loop는 영원히 계속 반복되면서 실행되게 된다.
따라서 PID를 코딩으로 한다면, 어떤 부분을 setup에 넣고 어떤 부분을 loop에 넣을지를 생각해야한다.
PID는 이전 포스팅에서 말했지만, P, I, D 제어를 각각 한 후 그 제어값을 모두 더하여 적용 하게 된다.
즉, P제어 + I제어 + D제어 = PID 제어값 이 되는 것이다.
그리고 PID는 오차와 관련된 개념이라고 했다. loop가 어느정도 주기를 갖고 계속 반복되면서 실행될텐데, 매번 실행될때마다 오차가 달라질 것이다. 따라서 loop안에는 매번 달라지는 오차를 가지고 P, I, D 제어값을 새롭게 갱신해주어야 할 필요가 있다.
프로그래밍언어에서는 변수라는 게 있다. 말그대로 변하는 수다. P, I, D 게인값들은 변하지 않는 상수로 지정되어야 하고 오차가 변수로 지정되어야 할 것이다. (꼭 그런건 아니지만 일반적으로!)
그런데 아두이노는 P, I, D 라는 개념이 없다. 아무것도 모른다. 고로 그게 뭔지, 미리 선언해줄 필요가 있다.
예를 들어, Kp, Ki, Kd를 각각 PID의 게인값이라고 생각해보자. 그리고 난 그 값에 각각 1.2, 2.5, 3.2을 지정해주고 싶다.
그렇다면 아래와 같이 선언해주면 된다.
double Kp = 1.2; double Ki = 2.5; double Kd = 3.2;
void setup() { // put your setup code here, to run once:
}
void loop() { // put your main code here, to run repeatedly:
}
자, 우측은 이해하기가 쉽다. Kp = 1.2 이런 부분은 직관적으로 와닿을 것이다. 그런데 좌측에 double은 뭔가?
아두이노는 우리가 선언하려는 숫자가 정수인지, 실수인지도 모른다. 그걸 우리가 말해주지 않으면 얘는 해석을 못한다. 1.2는 정수가 아니라 실수 영역에 있기 때문에 실수 변수를 얘기하는 double로 선언해주어야 한다. 정수 변수는 int 로 바꿔주면 된다.
자 이제 게인값들을 선언했으니, 오차도 선언해주도록 하자. 오차는 error 라고 하겠다. 오차는 정수보다는 실수인게 더 섬세하고 좋을 것 같으니 실수로 선언!
double Kp = 1.2; double Ki = 2.5; double Kd = 3.2; double error;
void setup() { // put your setup code here, to run once:
}
void loop() { // put your main code here, to run repeatedly:
}
이 경우는 error에 특정 값을 넣지 않았다. 왜? 이건 변수니까 말이다. Kp, i, d는 상수로 고정시킬 것이기 때문에 저렇게 미리 선언해놓은 거고, error는 루프가 계속 반복실행됨에 따라 변하는 수이기 때문에 굳이 넣지 않았다. 저렇게 아무것도 넣지 않으면 초기값이 0으로 자동배정되는 걸로 알고 있다.
이제, 오차에 필요한 현재값과 목표값을 선언해보도록 하자.
목표값은 이전 포스팅에서 예를 든 것처럼, 10도라고 하고 desired_angle로 선언하겠다. 그리고 현재값은 mpu6050을 통해 추출한 각도값으로, 실제 코드는 있다고 가정하고 그 값은 current_angle 이라고 하겠다.
double Kp = 1.2; double Ki = 2.5; double Kd = 3.2; double error;
double desired_angle = 10; double current_angle;
void setup() { // put your setup code here, to run once:
}
void loop() { // put your main code here, to run repeatedly:
}
자, 이게 error을 정의할 필요가 있다. error는 오차이다. 즉, 목표값에서 현재값을 뺀 수치가 될 것이다. 그리고 이 오차는 매 순간순간 달라질 것이다. 드론이 첨엔 10도 오차가 있다가, 그 쪽으로 회전을 시작하면 9도 8도 … 1도 0도까지 점점 오차가 줄어들게 아닌가. 고로 매 순간순간 갱신해줘야하는 변수가 되는 것이다. 그렇다면? 당연히 loop안에서 선언되어야 한다.
double Kp = 1.2; double Ki = 2.5; double Kd = 3.2; double error;
double desired_angle = 10; double current_angle;
void setup() { // put your setup code here, to run once:
}
void loop() { // put your main code here, to run repeatedly:
current_angle갱신 코드; error = desired_angle – current_angle;
}
처음에 넣은 current_angle갱신코드란? 이건 현재 각도값을 의미하는데, 현재 드론이 기울어진 각도값도 mpu6050의 연산에 의해 실시간으로 변화되어야만 한다. 따라서 loop안에 넣어준거고, 이 부분은 mpu6050에 관련된 코딩이 필요하기 때문에 생략하고 위와 같이 표시하였다.
자, 이제 오차인 error가 아두이노에서 선언되어 해석가능해졌으므로, 본격적으로 PID 제어를 시작해보자.
double Kp = 1.2; double Ki = 2.5; double Kd = 3.2; double error; double error_previous;
double desired_angle = 10; double current_angle;
double P_control, I_control, D_control; double Time = 0.004;
void setup() { // put your setup code here, to run once:
}
void loop() { // put your main code here, to run repeatedly:
current_angle갱신 코드; error = desired_angle – current_angle;
P_control = Kp * error; I_control = I_control + Ki * error * Time; D_control = Kd * (error – error_previous) / Time;
error_previous = error;
}
이번엔 추가된 게 좀 많다. 먼저 loop안을 보면, P컨트롤, I컨트롤, D컨트롤, 그리고 error_previous, Time 등과 같은 새로운 변수들이 선언된 것을 알 수 있다.
고로 맨 윗부분에 선언해준 것이다. 특히 Time은 한 루프가 도는 데 걸리는 시간을 의미한다. 내가 만든 드론은 한 루프 도는데 걸리는 시간이 약 3~4ms기 때문에 0.004로 해준건데, 사실 꼭 이렇게 할 필요는 없다. 그냥 4로 해도되고 4000으로 해도되고. Time이 수식적으로 가지는 의미는 그냥 ‘상수’일 뿐이다. 따라서 아무렇게나 지정해줘도, 또 다른 상수인 Kd나 Ki로 커버할만한 수준이기만 하면 되는것이다.
쉽게 생각해서, 4 * 6이나, 3 * 8이나 똑같은 수 아닌가. 곱해서 똑같이 나오게 숫자를 조정할 수 있기 때문에 꼭 time을 주기로 맞춰줄 필요는 없다는 것이다.
그리고 가장 아래보면 error_previous = error라고 선언한 부분이 있다. 아두이노에서는 이럴 때 우측에 있는 녀석을 좌측값으로 저장하라고 해석한다.
즉, error_previous라는건 지금 루프가 아니라 바로 이 전에 루프가 실행될 때의 error값을 의미한다.
만약 처음 error가 3이라고 해보자. 그러면 loop는 위에서부터 아래로 실행될 것이므로 error_previous에도 3이 저장 될 것이다.
그리고 loop가 다시 돌았을 때, 갱신된 현재각도에 의해 오차인 error가 5가 되었다고 해보자. 그리고 D_control을 보면, Kd * (5 – 3) / 0.004 가 될 것이다.
즉 컨트롤 부분에서 계산할 때 바로 직전의 에러 값이 previous에 저장되는 것이다.
I_control 부분은, 기존 I_control 값에다가 추가로 I 제어를 통해 얻은 값을 더하라는 것이다. 이전 포스팅에서 I 제어의 역할이 오차를 누적시켜 최종적으로 오차를 0으로 보내는 데 있다고 했는데, 이와 같은 방법으로 ‘누적’ 시킨다.
다만 언어적으로 좀 더 편하게 쓸 수 있다.
I_control += Ki * error * Time
이렇게 +=라고 하면, 위와 똑같은 의미를 가진다. 그냥 언어적인 것이니까 외우고 사용하면 된다.
이제 다음으로 넘어가보자.
double Kp = 1.2; double Ki = 2.5; double Kd = 3.2; double error; double error_previous;
double desired_angle = 10; double current_angle;
double P_control, I_control, D_control; double Time = 0.004; double PID_control;
void setup() { // put your setup code here, to run once:
}
void loop() { // put your main code here, to run repeatedly:
current_angle갱신 코드; error = desired_angle – current_angle;
P_control = Kp * error; I_control += Ki * error * Time; D_control = Kd * (error – error_previous) / Time;
PID_control = P_control + I_control + D_control; PID_control = constrain(PID_control, 0, 255); analogWrite(6, PID_control);
error_previous = error;
}
PID_control이라는 변수를 또 만들었다. 말했듯이, PID제어값은 P, I, D 제어를 통해 나온 값들을 모두 더한 값이므로 그냥 더해준 것이다.
그 뒤에 나오는 constrain은, 아두이노에서 제공하는 함수이다.
저걸 쉽게 얘기하면, PID_control이라는 값이 0부터 255까지의 숫자 범위를 가지도록 제한하는 것이다.
예를들어 PID_control이 -100이라는 값이 되면, 0으로 저장이 되고, 1000이라는 값이 되면 255로 저장이 된다. 0과 255사이의 값은 그 값 그대로 저장된다.
이렇게 해주는 이유는, 그 뒤에 나오는 anaglogWrite이라는 함수가 0부터 255사이의 숫자만 받아들이기 때문이다.
analogWrite은 전압을 인가하는 함수로, 6번 핀에 0~255 사이에 해당하는 전압을 주라는 명령신호다. 0은 0V, 255는 5V를 주게 되는데
사실 실제 드론을 만들 때는 이 함수를 쓰지 않을 것이다. servo 라이브러리를 활용하여 다른 함수를 쓸 예정인데
이 포스팅의 목적은 아무튼 PID 제어 코드의 기본을 설명하는 것이기 때문에 그냥 그대로 가는걸로..
최종적으로 나온 PID_control 이라는 값이 가장 중요하다. 이게 PID 제어를 통해 구한 제어값이 되기 때문이다.
다음으로, 조금 보기좋게 코드를 정리하기 위해 다음과 같이 해보았다.
double Kp = 1.2; double Ki = 2.5; double Kd = 3.2; double error; double error_previous;
double desired_angle = 10; double current_angle;
double P_control, I_control, D_control; double Time = 0.004; double PID_control;
void setup() { // put your setup code here, to run once:
}
void loop() { // put your main code here, to run repeatedly: pidcontrol();
}
void pidcontrol() {
current_angle갱신 코드; error = desired_angle – current_angle;
P_control = Kp * error; I_control += Ki * error * Time; D_control = Kd * (error – error_previous) / Time;
PID_control = P_control + I_control + D_control; PID_control = constrain(PID_control, 0, 255); analogWrite(6, PID_control);
error_previous = error;
}
뭐가 달라졌나?
바로 void pidcontrol 이라는걸 만들었다는 데 있다. 이건 쉽게 말해, 그냥 그룹으로 묶어놓는거라고 보면 된다.
loop가 가장 중요한 부분인데, 위위처럼 loop안에 모든 코드를 작성하게 되면 보기가 매우 불편하다. 때문에 항목별로 묶어서 따로 이렇게 정리해놓는 것이다. loop안에는 pidcontrol() 이라고만 선언해주면, pidcontrol이라고 선언된 그룹이 실행되게 된다.
고로 위랑 위위는 똑같은 코드이다! 정리해서 보기가 더 수월할 뿐!
이게 전부다!
PID 제어는 이렇게 하면 된다. 시작할때 오차는 10도였겠지만 시간이 흐르면 0으로 점점 줄어들어 원하는 목표값에 도달할 것이다.
단, Kp, Ki, Kd라는 게인값을 잘 맞추었다면 말이다. 이전 포스팅에서 움짤을 하나 사용했었는데, 그것처럼 반응을 보일 것이다. 제대로 게인값을 맞추지 않으면 오차가 오히려 더 커질 수도 있다. 드론이라는 시스템에 맞춰 적당한 값을 맞춰주어야 하는데 이 부분은 실험을 통해서 검증할 수 있다.
아무튼 제어 코드는 이와 같다. 실제 드론을 날릴때는 이중 pid라고 하여, pid 제어를 겹으로 싸서 이중으로 만든 걸 쓸텐데 별로 어려울 건 없다. 똑같다! 그냥 겹으로 한번 싸주기면 하면 된다.
최종 코드는 계속 포스팅하면서 써가는 걸로.
*** 19.12 수정사항
안녕하세요.
많은 분들이 아두이노 코드를 요청하셔서 제작했던 코드를 아래 포스팅에 첨부하였습니다.
https://hyongdoc.tistory.com/270
PID 제어와 아두이노 예제 코드
PID 제어를 쓸 일이 생길수 있을 것 같아서 자료를 정리중입니다. 어차피 저도 이론적인 내용을 상세히 알지는 못하므로… 이론을 쉽게 정리하고 아두이노 코드로 옮기는 작업을 해야죠. 정리되는대로 이 페이지는 업데이트 됩니다.
[출처] PID제어란!!|작성자 화이팅1. PID 제어란 ?
자동제어 방식 가운데서 가장 흔히 이용되는 제어방식으로 PID 제어라는 방식이 있다.
이 PID란,
P: Proportinal(비례)
I: Integral(적분)
D: Differential(미분)
의 3가지 조합으로 제어하는 것으로 유연한 제어가 가능해진다.
2. 단순 On/Off 제어
단순한 On/Off 제어의 경우에는 제어 조작량은 0%와 100% 사이를 왕래하므로 조작량의 변화가 너무 크고, 실제 목표값에 대해 지나치게 반복하기 때문에, 목표값의 부근에서 凸凹를 반복하는 제어로 되고 만다. 이 모양을 그림으로 나타내면 아래 그림과 같이 된다.
3. 비례 제어 (P 제어 )
이에 대해 조작량을 목표값과 현재 위치와의 차에 비례한 크기가 되도록 하며, 서서히 조절하는 제어 방법이 비례 제어라고 하는 방식이다. 이렇게 하면 목표값에 접근하면 미묘한 제어를 가할 수 있기 때문에 미세하게 목표값에 가까이 할 수 있다. 이 모양은 아래 그림과 같이 나타낼 수 있다.
-PID제어기에서 반드시 사용하는 가장 기본적인 제어이며 구현하기가 쉽다. 이 제어만으로는 적분기가 플랜트에 없을 경우에 정상상태 오차가 발생할 수 있다.
-비례제어란 기준신호와 되먹임 신호 사이의 차인 오차신호에 적당한 비례상수 이득을 곱해서 제어신호를 만들어내는 제어기법을 말하며, 오차신호에 비례하는(Proportional) 제어신호를 만든다는 뜻에서 이 기법에 의한 제어기를 비례제어기(Proportional Controller), 또는 영문약자를 써서 P제어기라고 부른다
?장점 – 구성이 간단하여 구현하기가 쉽다.
?단점 – 이득의 조정만으로는 시스템의 성능을 여러 가지 면에서 함께 개선시키기는 어렵다. 상승시간과 초과 사이의 상충문제를 절충하지 못함.
4. 적분 제어 (I 제어 )
정상상태 오차를 없애는데 사용. 계수조정이 잘못되면 시스템이 불안해지고 반응이 느려진다.
5. 비례미분 제어 (PD 제어 )
-오차신호를 미분하여 제어신호를 만들어내는 미분제어를 비례제어에 병렬로 연결하여 사용하는 제어기법. 비례제어 부분과 미분제어를 함께 쓴다는 뜻에서 이 기법에 의한 제어기를 비례미분 제어기(proportional-derivative controller), 또는 PD제어기 라고 한다. D요소를 부가한 것으로 인해 PD제어기는 단순한 P 제어기보다 응답이 빠르다.
-오차신호의 미분값에 비례하는 제어신호를 되먹임시켜 오차 신호의 변화를 억제하는 역할을 하기 때문에 감쇠비를 증가시키고 초과를 억제하는 데에 효과적이다. 이러한 미분제어의 효과를 고려하여 PD제어기를 적절히 설계하면 시스템의 과도응답 특성을 개선시킬 수 있다. PD제어기를 사용하는 경우에 시스템 형식이 증가하지 않기 때문에 정상상태 응답특성은 개선되지 않으므로 주의 하여야 한다.
Kp: 상승시간(rise time) 감소, 정상상태 오차 제거에
Ki : 정상상태 오차 제거, 과도응답 특성 나빠짐.
Kd: 시스템의 안정성 증가, 오버슈트, 과도응답 특성을 향상시킴
6. PI 제어
비례 제어로 잘 제어할 수 있을 것으로 생각하겠지만, 실제로는 제어량이 목표값에 접근하면 문제가 발생한다. 그것은 조작량이 너무 작아지고, 그 이상 미세하게 제어할 수 없는 상태가 발생한다. 결과는 목표값에 아주 가까운 제어량의 상태에서 안정한 상태로 되고 만다. 이렇게 되면 목표값에 가까워지지만, 아무리 시간이 지나도 제어량과 완전히 일치하지 않는 상태로 되고 만다. 이 미소한 오차를 “잔류편차”라고 한다. 이 잔류편차를 없애기 위해 사용되는 것이 적분 제어이다. 즉, 미소한 잔류편차를 시간적으로 누적하여, 어떤 크기로 된 곳에서 조작량을 증가하여 편차를 없애는 식으로 동작시킨다. 이와 같이, 비례 동작에 적분 동작을 추가한 제어를 “PI 제어”라 부른다. 이것을 그림으로 나타내면 아래 그림과 같이 된다.
-비례적분 제어란 오차신호를 적분하여 제어신호를 만들어내는 적분제어를 병렬로 연결하여 사용하는 제어기법을 가리킨다. 비례제어 부분과 더불어 오차신호를 적분(integral)하여 제어신호를 만드는 적분제어를 함께 쓴다는 뜻에서 이 기법에 의한 제어기를 비례적분 제어기(proportional-integral controller), 또는 영문약자를 써서 PI제어기라고 부른다. 정상상태 오차를 없애면서 시스템의 반응을 빠르게 하려면 비례적분 제어기를 사용하면 된다.
?장점 – P제어기와 I 제어기의 단점을 서로 보완해 줌으로써 전달함수에 시스템의 유형을 높여주고 정상상태 오차를 줄여주면서 과도응답으로 발생한 시스템의 느린 반응을 빠르게 할 수 있다. 감쇠비를 증가시키고 동시에 정상상태 오차도 개선.
?단점 – Gain계수조정이 잘못되면 시스템이 불안해지고 반응이 느려진다. Overshoot가 증가하고 Ts가 증가한다. 이러한 단점을 보완하기 위해서는 D제어기를 사용함으로써 해결된다. 상승시간이 느려지는 등 과도응답에는 불리하다.
7. 미분 제어와 PID 제어
PI 제어로 실제 목표값에 가깝게 하는 제어는 완벽하게 할 수 있다. 그러나 또 하나 개선의 여지가 있다. 그것은 제어 응답의 속도이다. PI 제어에서는 확실히 목표값으로 제어할 수 있지만, 일정한 시간(시정수)이 필요하다. 이때 정수가 크면 외란이 있을 때의 응답 성능이 나빠진다.
즉, 외란에 대하여 신속하게 반응할 수 없고, 즉시 원래의 목표값으로는 돌아갈 수 없다는 것이다. 그래서, 필요하게 된 것이 미분 동작이다. 이것은 급격히 일어나는 외란에 대해 편차를 보고, 전회 편차와의 차가 큰 경우에는 조작량을 많이 하여 기민하게 반응하도록 한다. 이 전회와의 편차에 대한 변화차를 보는 것이 “미분”에 상당한다. 이 미분동작을 추가한 PID 제어의 경우, 제어 특성은 아래 그림과 같이 된다. 이것으로 알 수 있듯이 처음에는 상당히 over drive하는 듯이 제어하여, 신속히 목표값이 되도록 적극적으로 제어해 간다.
-PD제어기는 시스템의 제동비를 증가시켜서 과도응답특성을 개선시키지만 정상상태 응답을 개선하는 데에는 효과가 없으며, PI제어기는 정상상태 오차를 개선시키지만 상승시간이 느려지는 등 과도응답에는 불리하다는 것을 알았다. 따라서, 정상상태 응답과 과도상태 응답을 모두 개선하려면 PI 와 PD제어기의 장점들을 조합하는 방법을 자연스럽게 생각할 수 있는데, 이러한 목적으로 제안된 제어기가 바로 PID 제어기이다.
8. 컴퓨터에 의한 PID 제어 알고리즘
원래 PID 제어는 연속한 아날로그량을 제어하는 것이 기본으로 되어 있다. 그러나, 컴퓨터의 프로그램으로 PID 제어를 실현하려고 하는 경우에는 연속적인 양을 취급할 수 없다. 왜냐하면, 컴퓨터 데이터의 입출력은 일정시간 간격으로밖에 할 수 없기 때문이다. 게다가 미적분 연산을 착실히 하고 있는 것에서는 연산에 요하는 능력으로 인해 고성능의 컴퓨터가 필요하게 되고 만다. 그래서 생각된 것이 샘플링 방식(이산값)에 적합한 PID 연산 방식이다.
우선, 샘플링 방식의 PID 제어의 기본식은 다음과 같이 표현된다.
조작량 = Kp×편차 + Ki×편차의 누적값 + Kd×전회 편차와의 차
(비례항) (적분항) (미분항)
기호로 나타내면,
MVn = MVn-1 + ΔMVn
ΔMVn = Kp(en-en-1) + Ki en + Kd((en-en-1)-(en-1-en-2))
MVn, MVn-1: 금회, 전회 조작량
ΔMVn: 금회 조작량 미분
en, en-1, en-2: 금회, 전회, 전전회의 편차
이것을 프로그램으로 실현하기 위해서는 이번과 전회의 편차값만 측정할 수 있으면 조작량을 구할 수 있다.
9. 파라미터를 구하는 방법
PID 제어 방식에 있어서의 과제는 각 항에 붙는 정수, Kp, Ki, Kd를 정하는 방법이다.
이것의 최적값을 구하는 방법은 몇 가지 있지만, 어느 것이나 난해하며, 소형의 마이크로컴퓨터로 실현하기 위해서는 번거로운 것이다(tuning이라 부른다). 그래서, 이 파라미터는 cut and try로 실제 제어한 결과에서 최적한 값을 구하고, 그 값을 설정하도록 한다.
참고로 튜닝의 수법을 소개하면 스텝 응답법과 한계 감도법이 유명한 수법이다.
또, 프로세스 제어 분야에서는 이 튜닝을 자동적으로 실행하는 Auto tuning 기능을 갖는 자동제어 유닛도 있다. 이것에는 제어 결과를 학습하고, 그 결과로부터 항상 최적한 파라미터값을 구하여 다음 제어 사이클에 반영하는 기능도 실장되어 있다.
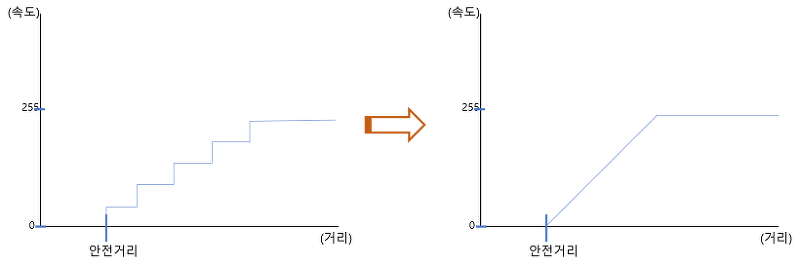
여기서 스텝 응답법에 있어서 파라미터를 구하는 방법을 소개한다. 우선, 제어계의 입력에 스텝 신호를 가하고, 그 출력 결과가 아래 그림이라고 하자(파라미터는 적당히 설정해 둔다).
위 그림과 같이 상승의 곡선에 접선을 긋고, 그것과 축과의 교점, 정상값의 63%에 해당하는 값으로 된 곳의 2점에서,
L: 낭비시간 T: 시정수 K: 정상값의 3가지 값을 구한다.
이 값으로부터, 각 파라미터는 아래 표와 같이 구할 수 있다.
제어 동작 종별 Kp의 값 Ki의 값 Kd의 값 비례 제어 0.3~0.7T/KL 0 0 PI 제어 0.35~0.6T/KL 0.3~0.6/KL 0 PID 제어 0.6~0.95T/KL 0.6~0.7/KL 0.3~0.45T/K
이 파라미터에 범위가 있지만, 이 크기에 의한 차이는 특성의 차이로 나타나며, 아래 그림과 같이, 파라미터가 많은 경우에는 미분, 적분 효과가 빨리 효력이 나타나므로 아래 그림의 적색선의 특성과 같이 overshoot이 크게 눈에 띈다. 파라미터가 작은 쪽의 경우는 하측 황색선의 특성과 같이 된다.
10. PID 게인 조정 및 제어 특성
PID 제어의 최적의 계수는 상태와 시스템에 따라서 달라진다. 이는 사용자의 시스템에 맞는 개별 제어 특성을 고려하여 게인 파라미터를 설정하는 것이 필요하다는 것을 의미한다. 다음은 PID 제어에 요구되는 특성들이다.
· 안정된 성능
· 빠른 응답
· 아주 작은 정상상태 편차
안정된 성능 영역 내에서 Kp, Ki, Kd의 각 파라미터를 조정해야 한다. 일반적으로 각각의 게인(Kp, Ki, Kp) 파라미터를 증가시키면(적분시정수 Ti 는 감소), 빠른 응답을 얻을 수 있다. 그러나 너무 많이 증가시키면 제어가 불안정하게 된다. 왜냐하면 피드백 값이 연속적으로 증가하거나 감소하기 때문에 제어의 진동을 야기시키게 된다. 최악의 경우 시스템은 발산모드가 된다. 다음은 각각의 파라미터를 조정하기 위한 방법이다.
(1) 목표값을 변화한 후, 응답이 너무 느리다.
→ P-게인(Kp)을 올린다. 응답은 빠르나 불안정하다.
→ P-게인(Kp)을 내린다.
(2) 목표값과 피드백값이 같아지지 않는다.
→ 적분 시간 Ti를 감소시킨다. 불안정하게 진동하며 일치한다.
→ 적분 시간 Ti를 증가시킨다.
(3) Kp를 올린 후, 응답이 여전히 느리다.
→ D-게인(Kd)을 올린다. 여전히 불안정하다.
→ D-게인(Kd)을 내린다.
* 각 게인 조정의 예(Kp & Ti)
· 목표값에 스텝변화가 주었을 때 피드백 신호의 응답이나 인버터의 출력주파수를 확인하면 된다
· 오실로스코프나 기타의 측정장비를 사용하여 피드백값이나 인버터의 출력주파수의 파형을 관찰한다(주파수 모니터).
· 디지털 입력신호에 의해서 변하는 목표값을 먼저 비교하여, 스텝응답으로 목표값을 변화시킬 수 있다.
· 프로세싱 전에는 제어시스템이 안정화되어야만 한다.
* 비례게인의 조정(Kp)
I-제어와 D-제어 없이 P-제어에 의해서만 구동을 시작한다(나머지는 0으로 설정).
먼저 P-게인을 최소값으로 설정하고 어떻게 동작하는 가를 본다. 결과값을 보고서 P-게인을 점차적으로 증가시킨다. 아주 만족할 만한 성능을 발휘할 때까지 이러한 절차를 반복한다(또 다른 방법은 최대 P-게인을 설정하고 성능을 관측한다. 만약 시스템이 불안정하면 중간값을 설정하고 어떻게 동작하는가를 관측한다. 이러한 절차를 계속해서 반복하면 된다). 만약 시스템이 불안정하다면 P-게인을 줄인다. 만약 허용범위에서 정상상태 편차가 존재한다면 P-게인의 조정은 완전히 완료된 것이다.
– 적분시간의 조정(Ti) & Kp의 값의 재조정 최소 적분시간을 설정함으로써 조정을 시작한다. 만약 조정이 어렵다면 P-게인을 줄인다. 편차가 수렴하지 않는 경우에는 적분시간을 줄인다. 만약 이 시간 동안 제어가 불안정하다면 P-게인을 줄인다. 안정된 파라미터를 찾을 때까지 계속해서 이러한 절차를 반복한다.
(1) 비례동작 (Proportional action) – P 동작
제어기는 기준 입력과 현재값과의 편차를 줄이는 방향으로 제어한다. 그때, 제어장치에 동작신호 Z(t)가 주어졌을 때, 조작량 y(t)가 얻어지는 경우, 즉 조작량 y(t)가 동작신호 Z(t)에 비례하여 변할 때의 그 관계식은
y(t) = K Z(t)
가 된다. 이것을 비례동작이라 한다. 여기서 K는 비례정수로 비례동작을 강하게 할 것인가, 약하게 할 것인가를 결정한다. 비례정수의 크기가 크면 기준입력에 현재치가 빠르게 접근하나 출력이 진동하여 제어의 안정성에 악영향을 미칠 수 있고, 비례정수의 크기가 작으면 기준입력에 천천히 현재치가 접근하며 잔류편차가 생길 우려가 있다.
(2) 적분동작 (Integral control action) – I 동작
제어대상에 주어지는 조작량의 변화속도가 동작신호에 비례 하는 동작, 적분동작은 적분 시간을 조정하여 적분동작을 크게 또는 작게 한다. 즉 적분시간을 길게 하면 조작량이 적어지고 따라서 기준치에 접근하는 시간이 길어진다. 적분시간이 짧으면 조작량이 많아지게 되어 기준치에 접근하는 시간이 짧아진다. 적분동작의 관계식은
y(t) = K Z(t) dt
가 된다. 적분동작은 단독으로 사용되지 않으며 P동작이나 D동작과 결합하여 PI, PID동작에 사용한다. 적분동작은 P동작에서 발생할 수 있는 잔류편차를 없앨 수 있다. 적분시간이 너무 짧으면 제어 불능 상태에 빠질 수 있다.
(3) 미분동작 (Derivative action)
조작량 y(t)가 동작신호 Z(t)에 미분동작을 한다. 미분동작은 편차의 변화율에 상응하는 조작량을 연산하여 편차의 변화를 억제한다. 미분동작의 관계식은
y(t) = K dZ(t)/dt
가 된다. 미분동작은 단독으로 사용되지 않으며 P동작이나 D동작과 결합하여 PI, PID동작에 사용한다. 일반적으로 미분동작을 사용한 제어기는 기준 입력에 접근하는 속도가 빨라지고 현재치의 급변이나 외란을 억제하는 효과가 있다.
(4) PID 제어 유니트
비례 적분 미분 동작은 위에서 설명한 3가지 동작을 조합한 동작으로 관계식은
y(t) = K ( Z 1/Ti Z(t) dt Td dZ(t)/dt )가 된다.
PID 제어기 알고리즘을 코드로 표현
표준 PID 제어기 알고리즘은 다음과 같습니다.
이 알고리즘을 코드로 간단하게 표현하자면 다음과 같습니다.
Error = Setpoint – Input; PTerm = Kp * Error; ITerm += Ki * Error * dt;
현재 오차(Error)는 설정(Setpoint) 값에서 현재 입력(Input) 값을 빼서 구합니다.
비례항(PTerm)은 비례항 이득값(Kp)에 현재 오차를 곱해서 구합니다.
적분항(ITerm)은 적분항 이득값(Ki)에 현재 오차와 주기(dt)를 곱해서 더해줍니다.
미분항(DTerm)을 구하기 위해서는 다음과 같이 구합니다.
dError = Error – prevError ; DTerm = Kd * ( dError / dt ) ;
오차 변화(dError)는 현재 오차(Error)에서 이전 오차(prevError)를 뺀 값입니다.
미분이라는 것이, 그래프의 순간의 기울기(오차 변화율)를 알고자 하는 것이기 때문에 짧은 순간의 오차 변화량을 순간 시간 변화량(주기)으로 나눠줍니다.(dError / dt)
마지막으로, 미분항(DTerm)은 미분항 이득값(Kd)에 오차 변화율을 곱해서 구합니다.
출력 값은 다음과 같습니다.
Output = PTerm + ITerm + DTerm ;
참고 문헌 : 아두이노로 드론 만들고 직접 코딩하기
So you have finished reading the pid 제어 코드 topic article, if you find this article useful, please share it. Thank you very much. See more: 파이썬 PID 제어 코드, DC 모터 PID 제어 소스, 아두이노 DC 모터 PID 제어, pid제어 알고리즘, PID 제어 예시, PLC/PID 제어, pid제어 실생활, PID 제어 구현