
You are looking for information, articles, knowledge about the topic nail salons open on sunday near me 모터 드라이버 아두 이노 on Google, you do not find the information you need! Here are the best content compiled and compiled by the Chewathai27.com/to team, along with other related topics such as: 모터 드라이버 아두 이노 아두이노 12v 모터 제어, L298n 모터 드라이버, 모터드라이버 사용법, 아두이노 dc모터 제어, 아두이노 모터 드라이버 없이, 아두이노 서보모터 드라이버, 아두이노 모터 드라이버 종류, L293D 모터 드라이버
[아두이노] DC 모터 사용하기(L298N 모터드라이버 사용)
- Article author: rudalskim.tistory.com
- Reviews from users: 1849
 Ratings
Ratings - Top rated: 4.2
- Lowest rated: 1
- Summary of article content: Articles about [아두이노] DC 모터 사용하기(L298N 모터드라이버 사용) DC 모터를 제어하기 위한 드라이버 모듈은 여러가지 종류가 있는데 그 중에 일반적으로 많이 사용되는 L298N을 사용한 모터 드라이버를 테스트해 … …
- Most searched keywords: Whether you are looking for [아두이노] DC 모터 사용하기(L298N 모터드라이버 사용) DC 모터를 제어하기 위한 드라이버 모듈은 여러가지 종류가 있는데 그 중에 일반적으로 많이 사용되는 L298N을 사용한 모터 드라이버를 테스트해 … DC 모터를 제어하기 위한 드라이버 모듈은 여러가지 종류가 있는데 그 중에 일반적으로 많이 사용되는 L298N을 사용한 모터 드라이버를 테스트해 보았습니다. 제품 사양 – 드라이버 칩 : L298N 듀얼 H-브리지 드라..
- Table of Contents:
태그
관련글
댓글
3
최근글
인기글
최근댓글
공지사항
태그
전체 방문자
티스토리툴바
![[아두이노] DC 모터 사용하기(L298N 모터드라이버 사용)](https://img1.daumcdn.net/thumb/R800x0/?scode=mtistory2&fname=https%3A%2F%2Fblog.kakaocdn.net%2Fdn%2FbM15sT%2FbtrtpQ9yyzs%2FVqfeBHBpfbFVZfDjtolrg0%2Fimg.png)
[아두이노] DC 모터의 제어(모터드라이버 L298N) 1편
- Article author: deneb21.tistory.com
- Reviews from users: 9336 Ratings
- Top rated: 3.0
- Lowest rated: 1
- Summary of article content: Articles about [아두이노] DC 모터의 제어(모터드라이버 L298N) 1편 모터 드라이버는 모터의 속도, 정방향, 역방향 회전 등을 아두이노의 프로그래밍을 통해서 제어하게 된다. 물론 블루투스 모듈, 와이파이 모듈 등을 … …
- Most searched keywords: Whether you are looking for [아두이노] DC 모터의 제어(모터드라이버 L298N) 1편 모터 드라이버는 모터의 속도, 정방향, 역방향 회전 등을 아두이노의 프로그래밍을 통해서 제어하게 된다. 물론 블루투스 모듈, 와이파이 모듈 등을 … L298N 모듈은 모터의 제어를 위한 모터 드라이버 모듈이다. 모터의 제어가 필요한 프로젝트를 진행 할 시 필수적으로 모터 드라이버 모듈이 사용된다. 모터 드라이버는 모터의 속도, 정방향, 역방향 회전 등을 아..
- Table of Contents:
티스토리툴바
![[아두이노] DC 모터의 제어(모터드라이버 L298N) 1편](https://img1.daumcdn.net/thumb/R800x0/?scode=mtistory2&fname=https%3A%2F%2Ft1.daumcdn.net%2Fcfile%2Ftistory%2F227E245057AD47872D)
모터 드라이버 아두 이노
- Article author: kocoafab.cc
- Reviews from users: 28666 Ratings
- Top rated: 3.5
- Lowest rated: 1
- Summary of article content: Articles about 모터 드라이버 아두 이노 아두이노에서는 H-Brge회로가 내장된 모터 드라이버(Motor Driver) 를 이용해 DC모터를 제어합니다. 모터드라이버 2개의 핀에 각각 HIGH / LOW 신호 … …
- Most searched keywords: Whether you are looking for 모터 드라이버 아두 이노 아두이노에서는 H-Brge회로가 내장된 모터 드라이버(Motor Driver) 를 이용해 DC모터를 제어합니다. 모터드라이버 2개의 핀에 각각 HIGH / LOW 신호 …
- Table of Contents:
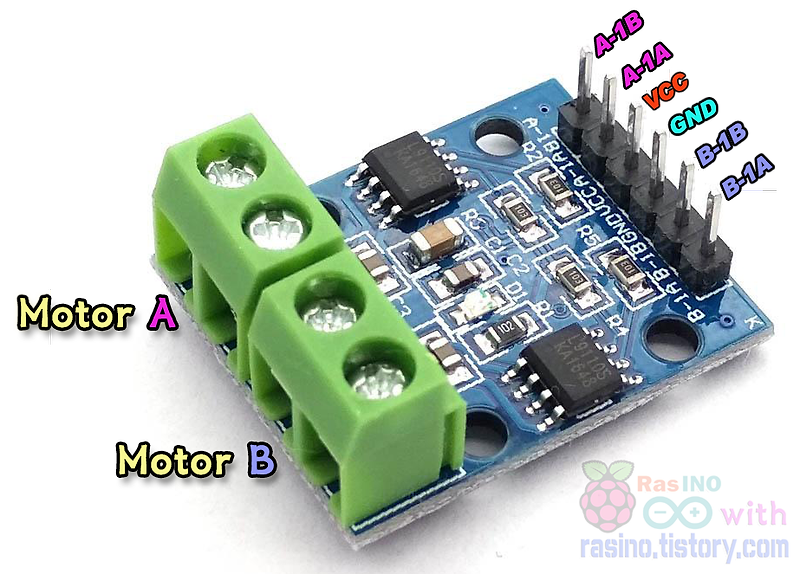
라즈이노 iOT :: 【 아두이노모듈#15】 L9110S #1(모터 드라이버) 모듈 사용하기
- Article author: rasino.tistory.com
- Reviews from users: 30654 Ratings
- Top rated: 3.3
- Lowest rated: 1
- Summary of article content: Articles about 라즈이노 iOT :: 【 아두이노모듈#15】 L9110S #1(모터 드라이버) 모듈 사용하기 【 아두이노모듈#15】 L9110S #1(모터 드라이버) 모듈 사용하기. 아두이노로 스텝모터나 DC 모터를 제어하기 위해서는 TR이나 IC를 사용하여, … …
- Most searched keywords: Whether you are looking for 라즈이노 iOT :: 【 아두이노모듈#15】 L9110S #1(모터 드라이버) 모듈 사용하기 【 아두이노모듈#15】 L9110S #1(모터 드라이버) 모듈 사용하기. 아두이노로 스텝모터나 DC 모터를 제어하기 위해서는 TR이나 IC를 사용하여, … 【 아두이노모듈#15】 L9110S #1(모터 드라이버) 모듈 사용하기 아두이노로 스텝모터나 DC 모터를 제어하기 위해서는 TR이나 IC를 사용하여, H-bridge (h-브릿지) 회로를 구성하여 정역(정회전, 역회전) 제어..
- Table of Contents:
【 아두이노모듈#15】 L9110S #1(모터 드라이버) 모듈 사용하기
티스토리툴바
아두이노로 DC모터 속도 제어하기 _ PWM이용
- Article author: diyver.tistory.com
- Reviews from users: 35982 Ratings
- Top rated: 4.7
- Lowest rated: 1
- Summary of article content: Articles about 아두이노로 DC모터 속도 제어하기 _ PWM이용 아두이노로 모터 회전속도를 제어할 수 있는데,. PWM 을 이용하여 모터드라이버에 신호를 주면 된다. 그 방법을 한번 알아보도록 하자. …
- Most searched keywords: Whether you are looking for 아두이노로 DC모터 속도 제어하기 _ PWM이용 아두이노로 모터 회전속도를 제어할 수 있는데,. PWM 을 이용하여 모터드라이버에 신호를 주면 된다. 그 방법을 한번 알아보도록 하자. <목표> – 모터를 사용하다보면 모터 출력을 조금만 더 낮추고 싶거나, 내 마음대로 조절하고 싶을때가 많다. 아두이노로 모터 회전속도를 제어할 수 있는데, PWM 을 이용하여 모터드라이버에 신호를 주면 된다…
- Table of Contents:
태그
관련글
댓글0
공지사항
최근글
인기글
최근댓글
태그
티스토리툴바

See more articles in the same category here: Top 423 tips update new.
[아두이노] DC 모터 사용하기(L298N 모터드라이버 사용)
반응형
DC 모터를 제어하기 위한 드라이버 모듈은 여러가지 종류가 있는데 그 중에 일반적으로 많이 사용되는 L298N을 사용한 모터 드라이버를 테스트해 보았습니다.
제품 사양
– 드라이버 칩 : L298N 듀얼 H-브리지 드라이버 칩
– 드라이브 부분의 공급전압 VMS : +5 V ~ 35 V-
– 드라이브 부분의 최대전류 : 2A / bridge
– 로직 부분의 공급전압 : 5 V
– 로직 부분의 작동 전류 범위 :0 ~ 36mA
– 입력제어신호 전압 범위 : H: 4.5~ 5.5V / L: 0V
– 최대 소비 전력 : 20W
– 보관 온도 : -25 ℃까지 130 ℃
– 드라이버 보드 크기 : 55mm * 60mm * 30mm
외형
아래 2개의 모듈은 사이즈만 다른 같은 모터 드라이버입니다.
제가 가지고 있는 모듈은 왼쪽 버전이고 요즘에는 전부 오른쪽 버전을 많이 사용하는것 같습니다.
MOTORA/MOTORB에 각 각의 DC 모터를 연결하여 총 2개의 DC 모터를 제어할 수 있으며 또한 MOTORA/MOTORB를 모두 사용하여 4선 스텝모터 1개를 제어할 수 있습니다.
회로도
요즘 판매되는것과는 조금 회로도가 다른데 전체적인 회로는 유사하니 참고용으로 사용하시면 됩니다.
위 색깔 칠해져 있는 부분에 대한 설명입니다.
Motor A/B : DC 모터를 각 각 연결하거나 4선 스텝모터를 연결합니다.
ENA/ENB : 모터 A/B쪽 동작시키거나 멈추게 합니다.
+12V/GND/+5V 단자 : 5V 이상의 전원을 사용하는 모터를 사용시 +12V에 모터 전원을 연결하고,
5V 전원을 사용하는 모터는 +12V가 아닌 +5V 단자에 모터 전원을 연결합니다.
자세한 전원 관련 설정은 위 회로도를 참고하여 연결하시면 됩니다.
회로구성
아래와 같이 DC 모터 한개만 연결하여 테스트를 해 보았습니다.
테스트용 소스
정방향 3초 -> 역방향 3초 -> 정지 1초 -> ENA를 PWM으로 사용하여 속도 조절된 정방향 3초 -> ENA를 PWM으로 사용하여 속도 조절된 역방향 3초 -> 정지 순서로 테스트할 수 있는 코드를 작성하였습니다.
int ENA = 10; int INA1 = 9; int INA2 = 8; int cmd = 0; void setup() { Serial.begin(9600); pinMode(ENA, OUTPUT); pinMode(INA1, OUTPUT); pinMode(INA2, OUTPUT); digitalWrite(ENA, LOW); digitalWrite(INA1, LOW); digitalWrite(INA2, LOW); Serial.println(“DC motor test”); Serial.println(“Forward “); digitalWrite(ENA, HIGH); digitalWrite(INA1, HIGH); digitalWrite(INA2, LOW); delay(3000); Serial.println(“Backward”); digitalWrite(ENA, HIGH); digitalWrite(INA1, LOW); digitalWrite(INA2, HIGH); delay(3000); Serial.println(“stop”); digitalWrite(ENA, LOW); digitalWrite(INA1, LOW); digitalWrite(INA2, LOW); delay(1000); Serial.println(“Forward-PWM”); analogWrite(ENA, 150); digitalWrite(INA1, HIGH); digitalWrite(INA2, LOW); delay(3000); Serial.println(“Backward-PWM”); analogWrite(ENA, 150); digitalWrite(INA1, LOW); digitalWrite(INA2, HIGH); delay(3000); Serial.println(“stop”); digitalWrite(ENA, LOW); digitalWrite(INA1, LOW); digitalWrite(INA2, LOW); } void loop() { }
테스트 영상
업로드 후 실행해 보면 아래와 같이 정상적으로 동작됩니다.
반응형
아두이노로 DC모터 속도 제어하기 _ PWM이용
<목표>
– 모터를 사용하다보면 모터 출력을 조금만 더 낮추고 싶거나, 내 마음대로 조절하고 싶을때가 많다.
아두이노로 모터 회전속도를 제어할 수 있는데,
PWM 을 이용하여 모터드라이버에 신호를 주면 된다.
그 방법을 한번 알아보도록 하자.
<준비물>
– 아두이노(우노, 나노, 메가), 모터드라이버(L298N, L9110)
(모터 드라이버마다 사용법이 다를 수 있음)
<회로도>
< 12V 이하의 건전지 사용 시 회로 >
< 컴퓨터 USB 전원 사용 시 회로 >
<코드>
int motor_1 = 10; int motor_2 = 9; void setup() { // put your setup code here, to run once: pinMode(motor_1, OUTPUT); pinMode(motor_2, OUTPUT); } void loop() { // put your main code here, to run repeatedly: delay(1000); analogWrite(motor_1, 255/3); digitalWrite(motor_2, 0); delay(2000); analogWrite(motor_1, 255*2/3); digitalWrite(motor_2, 0); delay(2000); analogWrite(motor_1, 255); digitalWrite(motor_2, 0); delay(1000); }
<실행 결과>
youtu.be/nSYL2PLpLiI
위의 영상을보면 처음 2초 동안은 느리게
그다음 2초 동안은 중간 속도로
그다음 2초 동안은 모터 최고 속도로 회전하는 작동을 볼 수 있다.
코드를 보면 analogWrite( ) 함수를 사용하는 것을 볼 수 있다.
analogWrite( ) 함수를 사용함으로써 짧은 시간동안 제어신호를 보내고 끊고를 반복할 수 있는데,
analogWrite( ) 함수를 이용하기 위해서는 아두이노에서 PWM 핀을 확인해야 한다.
기본적으로 아두이노 우노와 나노는 핀맵이 똑같기 때문에, 아두이노 핀맵을 참고하면 된다.
아두이노 우노에서는
3, 5, 6, 9, 10, 11번 핀에서만 PWM 제어가 가능하다.
나머지 핀들은 출력할 때, HIGH 또는 LOW만 가능하다는 뜻이다.
위에서 소개한 방법은 PWM 제어가 가능한 핀들이 여유가 있을 때 사용하면 된다.
그런데 핀들이 많아지고 PWM 제어 핀이 여유가 없다면 다른 방법으로 모터 제어를 해야한다.
L298N 모터드라이버에서는 PWM 제어를 하는 방법은 두가지가 있다.
여태 필자가 위에서 사용한 방식 그대로 사용하는 방법이 있고,
다른 방법은 L298N 과 같은 모터드라이버에서만 가능한 방법이다.
모터드라이버에 있는 ENA 점퍼핀을 제거해야 한다.
점퍼핀을 제거하고 해당 핀에 아두이노 PWM제어 가능 핀을 연결시켜주어야 한다.
그리고 나머지 핀
IN 1, IN 2 핀은 아두이노의 아무 digital Pin 에 연결해주면 된다.
필자의 경우
IN 1 – 8번
IN 2 – 7번
ENA – 9번 핀에 연결해 주었다.
코드는 아래 코드를 이용하면 된다.
int motor_1 = 8; int motor_2 = 7; int motor_pwm = 9; void setup() { // put your setup code here, to run once: pinMode(motor_1, OUTPUT); pinMode(motor_2, OUTPUT); digitalWrite(motor_1, HIGH); digitalWrite(motor_2, LOW); pinMode(motor_pwm, OUTPUT); analogWrite(motor_pwm, 0); } void loop() { // put your main code here, to run repeatedly: delay(1000); analogWrite(motor_pwm, 255/3); delay(2000); analogWrite(motor_pwm, 255*2/3); delay(2000); analogWrite(motor_pwm, 255); delay(1000); }
youtu.be/bIjKJjXAUyg
시연 영상은 위 동영상을 확인하면 된다.
앞선 시연과 같다는 것을 볼 수 있다.
모터드라이버는 모스펫을 가지고 모터를 제어한다고 생각하면 된다.
위의 문구도 이해하기 어렵다면 스위치를 가지고 제어한다고 생각하면 된다.
스위치를 짧은 시간동안 여러번 켰다 껐다 하면서 모터에 전원을 공급해 주는 것이다.
그렇게 해서 모터에 인가되는 전압을 조절할 수 있는 것이다.
PWM에 대한 이해를 하려면 위의 그림을 이해해야 한다.
5V 전원에서 스위치를 켰다 껐다를 1초동안 몇 퍼센트로 반복하는지로 이해하면 된다.
제일 위에부터 보면
0%는 1초 동안 스위치를 켜지 않은 것으로 0V가 된다.
25%는 1초 동안 스위치를 켰다 껐다를 25%의 비율로 반복한 것으로 5V * 25% = 1.25V 로 출력된 것 처럼 보인다.
아두이노에서는 64/255 = 25% 이므로, analogWrite() 에서는 64 값을 주어야 한다.
DUTY 비에 대해서 알았으니
이제 모터드라이버 내부를 살펴보자.
일단 우리가 제거했었던 ENA 점퍼핀의 역할은
모터 A를 사용할 것이냐 말것이냐를 정하는 핀인데
평소에는 점퍼핀으로 연결되어 있어서 무조건 모터 A를 사용하는 것으로 설정되어 있다.
그래서 IN1 과 IN2 에 analogWrite() 를 이용한 PWM 신호로 모터 속도를 제어할 수 있었다.
모터드라이버 내부에서 모터를 사용하는 것으로 받아들이고 IN1 과 IN2 에 따라서 모터속도를 결정하기 때문이다.
ENA 점퍼핀을 제거하게 되면 아무리 IN1 과 IN2 에 신호를 보내줘도 모터는 작동하지 않는데,
내부 회로에서 모터 A를 사용하는 회로가 끊겨있기 때문이다.
대신 ENA 핀에 아두이노의 PWM 핀을 연결해주고,
IN1 에는 HIGH 신호를, IN2 에는 LOW 신호를 준다면
모터는 IN1 과 IN2 에서 회전방향을 인지를 한 상태이지만, ENA 의 신호를 대기하고 있는 상황인 것이다.
여기서 ENA 신호를 PWM 제어로 보내주게 되면 전류가 흘렀다 말았다 하면서 모터속도를 제어해주게 되는 것이다.
너무 잡소리가 많았다.
그냥 위의 코드를 그대로 따라하면 사용가능하니 따라하면 된다.
L298N 의 경우 ENA 과 ENB 핀이 있지만
L9110 의 경우 ENA과 ENB핀이 없다고 해서 모터 속도 제어가 안 되는 것이 아니니
위에서 설명한 방법대로 사용하면 된다.
※ 궁금하시거나 질문사항이 있으시면 댓글로 작성해주시면 답변해 드릴 수 있는 부분에서 친절히 답변드리겠습니다!
So you have finished reading the 모터 드라이버 아두 이노 topic article, if you find this article useful, please share it. Thank you very much. See more: 아두이노 12v 모터 제어, L298n 모터 드라이버, 모터드라이버 사용법, 아두이노 dc모터 제어, 아두이노 모터 드라이버 없이, 아두이노 서보모터 드라이버, 아두이노 모터 드라이버 종류, L293D 모터 드라이버