
You are looking for information, articles, knowledge about the topic nail salons open on sunday near me 아두 이노 서보 모터 2 개 제어 on Google, you do not find the information you need! Here are the best content compiled and compiled by the https://chewathai27.com/to team, along with other related topics such as: 아두 이노 서보 모터 2 개 제어 아두이노 서보모터 영점, 아두이노 서보모터 응용, 아두이노 서보모터 LED, 아두이노 서브 모터, 모터 각도 제어, 서보모터 역 회전, 서보모터 전류
…
동작은 다음과 같다.
- W 입력 => 서보모터 1 앞으로 30도 회전
- S 입력 => 서보모터 1 뒤로 30도 회전
- A 입력 => 서보모터 2 왼쪽으로 30도 회전
- D 입력 => 서보모터 2 오른쪽으로 30도 회전
e4ds make
- Article author: make.e4ds.com
- Reviews from users: 9259
 Ratings
Ratings - Top rated: 3.1
- Lowest rated: 1
- Summary of article content: Articles about
e4ds make
Updating … - Most searched keywords: Whether you are looking for
e4ds make
Updating - Table of Contents:
e4ds make
[아두이노]2축 서보모터 초간단 제어하기, 간단한 프레임 제작까지
- Article author: diy-dev-design.tistory.com
- Reviews from users: 10074 Ratings
- Top rated: 3.5
- Lowest rated: 1
- Summary of article content: Articles about [아두이노]2축 서보모터 초간단 제어하기, 간단한 프레임 제작까지 우선 첫번째 스텝으로 2축으로 제어가 가능한 서보모터 마운트를 만들고 서보모터를 제어하는 것인데요, 이미 언젠가 사용하겠지 싶어서 구입해 둔 2축 … …
- Most searched keywords: Whether you are looking for [아두이노]2축 서보모터 초간단 제어하기, 간단한 프레임 제작까지 우선 첫번째 스텝으로 2축으로 제어가 가능한 서보모터 마운트를 만들고 서보모터를 제어하는 것인데요, 이미 언젠가 사용하겠지 싶어서 구입해 둔 2축 … 뭔가 목표가 생기면 과정이 분명해 진다. RC 카에 헤드트래킹을 이용한 FPV 를 구현하려는 목표가 생기고나니 과정을 잘 정리하는게 필요하겠다 싶어 포스트를 남깁니다. 우선 첫번째 스텝으로 2축으로 제어가 가..
- Table of Contents:
태그
관련글
댓글0
공지사항
최근글
인기글
최근댓글
태그
티스토리툴바
![[아두이노]2축 서보모터 초간단 제어하기, 간단한 프레임 제작까지](https://img1.daumcdn.net/thumb/R800x0/?scode=mtistory2&fname=https%3A%2F%2Fblog.kakaocdn.net%2Fdn%2FtbGKr%2FbtrsSkXBZmG%2FcxdabABnKOtkWDUQNduJQ1%2Fimg.webp)
Arduino Servo Motor 두개 동시에 제어해보자. :: 다루두루
- Article author: kd3302.tistory.com
- Reviews from users: 8349 Ratings
- Top rated: 4.3
- Lowest rated: 1
- Summary of article content: Articles about Arduino Servo Motor 두개 동시에 제어해보자. :: 다루두루 지난 글에서 서보모터를 다뤄보면서 Arduino Servo Motor의 작동원리를 알아봤는데요. 그때 글에서는 두 개 중 아래쪽 서보모터의 상태가 좋지 못해서 … …
- Most searched keywords: Whether you are looking for Arduino Servo Motor 두개 동시에 제어해보자. :: 다루두루 지난 글에서 서보모터를 다뤄보면서 Arduino Servo Motor의 작동원리를 알아봤는데요. 그때 글에서는 두 개 중 아래쪽 서보모터의 상태가 좋지 못해서 … 지난 글에서 서보모터를 다뤄보면서 Arduino Servo Motor의 작동원리를 알아봤는데요. 그때 글에서는 두 개 중 아래쪽 서보모터의 상태가 좋지 못해서 위쪽 것만 움직여 봤잖아요? 이번 글에서는 브라킷으로 연결..공부하면서 정리하는 노트같은 블로그입니다.,
- Table of Contents:
아두이노 서보모터 제어(심화)
- Article author: ai0.kr
- Reviews from users: 8552 Ratings
- Top rated: 4.4
- Lowest rated: 1
- Summary of article content: Articles about 아두이노 서보모터 제어(심화) – 3d 프린트 전에 아이소 핑크로 프로토 타입을 제작하시오. [추가 과제 – 블루투스로 서보모터 2개 제어하기.] 1. 회. …
- Most searched keywords: Whether you are looking for 아두이노 서보모터 제어(심화) – 3d 프린트 전에 아이소 핑크로 프로토 타입을 제작하시오. [추가 과제 – 블루투스로 서보모터 2개 제어하기.] 1. 회. 1. 기존 원킹쌤의 서보모터 교육 자료 복습 https://ai0.kr/3 [모듈 1-3] 아두이노 서보모터 제어하기 (feat. For 구문) ● 모듈 구성 안내 1-3-1. 서보모터란 무엇인가 1-3-2. 서보모터 기본 제어 1-3-3. for 구..
- Table of Contents:

아두이노 내부전원으로 서보모터(SG-90) 여러개 사용하는 방법
- Article author: diyver.tistory.com
- Reviews from users: 49870 Ratings
- Top rated: 4.9
- Lowest rated: 1
- Summary of article content: Articles about 아두이노 내부전원으로 서보모터(SG-90) 여러개 사용하는 방법 목표> – 아두이노 내부 전원은 매우 약하다. 각종 센서나 LED 사용에는 큰 문제가 없지만, 모터류를 사용할 때에는 문제가 항상 따른다. …
- Most searched keywords: Whether you are looking for 아두이노 내부전원으로 서보모터(SG-90) 여러개 사용하는 방법 목표> – 아두이노 내부 전원은 매우 약하다. 각종 센서나 LED 사용에는 큰 문제가 없지만, 모터류를 사용할 때에는 문제가 항상 따른다. <목표> – 아두이노 내부 전원은 매우 약하다. 각종 센서나 LED 사용에는 큰 문제가 없지만, 모터류를 사용할 때에는 문제가 항상 따른다. 전류가 부족한 문제로, 모터쪽으로 과전류가 흐르게 되면 아두이노가 오작..
- Table of Contents:
태그
관련글
댓글0
공지사항
최근글
인기글
최근댓글
태그
티스토리툴바
아두 이노 서보 모터 2 개 제어
- Article author: wiznetacademy.com
- Reviews from users: 19947 Ratings
- Top rated: 4.2
- Lowest rated: 1
- Summary of article content: Articles about 아두 이노 서보 모터 2 개 제어 서보 (servo) 모터 : DC 모터의 한 종류로 DC 모터에 귀환 회로를 추가하여 정확한 위치 제어가 가능하도록 구성된 모터이다. 가격 면에서는 귀환 제어 회로로 인해 스테핑 … …
- Most searched keywords: Whether you are looking for 아두 이노 서보 모터 2 개 제어 서보 (servo) 모터 : DC 모터의 한 종류로 DC 모터에 귀환 회로를 추가하여 정확한 위치 제어가 가능하도록 구성된 모터이다. 가격 면에서는 귀환 제어 회로로 인해 스테핑 …
- Table of Contents:
See more articles in the same category here: https://chewathai27.com/to/blog.
e4ds make
본 실습을 통해 서보모터의 기초를 연습한 후 최종적으로 로봇팔 제어 프로젝트까지 연결할 수 있다.
준비물 : Arduino, 서보모터 2개
내용 : Arduino Uno를 이용하여 서보모터 2개를 제어한다.
전원을 연결하게 되면 서브 모터 2개는 90도에 맞춰 움직인 후 입력을 기다리는 상태가 된다.
동작은 다음과 같다.
1. W 입력 => 서보모터 1 앞으로 30도 회전
2. S 입력 => 서보모터 1 뒤로 30도 회전
3. A 입력 => 서보모터 2 왼쪽으로 30도 회전
4. D 입력 => 서보모터 2 오른쪽으로 30도 회전
☞서보모터의 경우 회전이 0~180도까지 가능하기 때문에 코딩상에 회전을 0~180도까지 제한해야 한다.
회로 연결은 다음과 같다.
아두이노의 5V와 Ground를 브래드 보드에 연결하여 공통 전원을 구성한 후 서브모터 2개의 VCC, GND를 연결하였다. 서보모터에 사용되는 입출력 핀은 3, 5번을 연결하여 회로를 구성하였다. (서보모터는 PWM으로 제어하기 때문에 3,5,6,9,10,11번 핀을 사용하면 됨)
코딩은 다음과 같다. (주석 포함)
#include
//헤더파일 포함 Servo servo1; //servo1 변수 선언 Servo servo2; //servo2 변수 선언 int motor1 = 3; //motor1을 입출력 3번 핀에 연결 int motor2 = 5; //motor2을 입출력 5번 핀에 연결 int angle1 = 90; //초기 각도값 설정 int angle2 = 90; //초기 각도값 설정 void setup() { servo1.attach(motor1); //servo1에 입출력 3번 핀을 지정 servo2.attach(motor2); //servo2에 입출력 5번 핀을 지정 Serial.begin(9600); //시리얼 모니터 사용 Serial.println(“Enter the w,a,s,d “); } void loop() { if(Serial.available()) //시리얼 통신이 가능할 경우 { char input = Serial.read(); //시리얼 모니터 입력 값을 읽어옴 if(input ==’w’) //입력값이 W일 경우 { Serial.print(“+30”); for(int i = 0; i <30; i++) // 30번 반복 { angle1 = angle1 + 1; // angle1의 값에 1씩 30번을 더함 if(angle1 >=180) // angle1이 180보다 커지거나 같아질 경우 angle1 = 180; // angle1을 180으로 고정 servo1.write(angle1); // servo1을 angle1 값에 맞추어 동작 delay(10); } Serial.print(“\t\t”); Serial.println(angle1); } else if(input ==’a’) //입력값이 a일 경우 { Serial.print(“+30”); for(int j = 0; j <30; j++) { angle2 = angle2 + 1; if(angle2 >=180) angle2 = 180; servo2.write(angle2); delay(10); } Serial.print(“\t\t”); Serial.println(angle2); } else if(input == ‘s’) //입력값이 s일 경우 { Serial.print(“\t-30\t”); for(int i = 0; i <30; i++) // 30번 반복 { angle1 = angle1 -1; // angle1의 값에 1씩 30번을 빼기 if(angle1 <= 0) // angle1이 0보다 작아지거나 같을 경우 angle1 = 0; // angle1을 0으로 고정 servo1.write(angle1); // servo1을 angle 값에 맞추어 동작 delay(10); } Serial.println(angle1); } else if(input == 'd') //입력값이 d일 경우 { Serial.print("\t-30\t"); for(int j = 0; j <30; j++) { angle2 = angle2 -1; if(angle2 <= 0) angle2 = 0; servo2.write(angle2); delay(10); } Serial.println(angle2); } } } 시리얼 모니터를 통해 서보모터의 각도를 수치로 확인할 수 있다. 앞으로 모든 실습활동에서 시리얼 모니터를 통해 각도, 입력 값, 데이터 등을 확인할 것이기 때문에 시리얼모니터를 잘 활용하기를 바란다. 위에 빨간색 네모칸에 있는 돋보기 형태의 버튼을 누르게 되면 시리얼 모니터 창의 열리게 된다. 다른 방법으로는 상단의 툴 버튼을 눌러 시리얼 모니터를 클릭하면 시리얼 모니터가 열리게 된다. 시리얼 모니터 결과는 다음과 같다. 시리얼 모니터 입력창에 w, a, s, d를 입력하게 되면 입력한 값에 맞게 각도를 계산하여 현재의 서보모터 각도를 계산하여 출력한다. 동작영상
[아두이노]2축 서보모터 초간단 제어하기, 간단한 프레임 제작까지
뭔가 목표가 생기면 과정이 분명해 진다.
RC 카에 헤드트래킹을 이용한 FPV 를 구현하려는 목표가 생기고나니 과정을 잘 정리하는게 필요하겠다 싶어 포스트를 남깁니다.
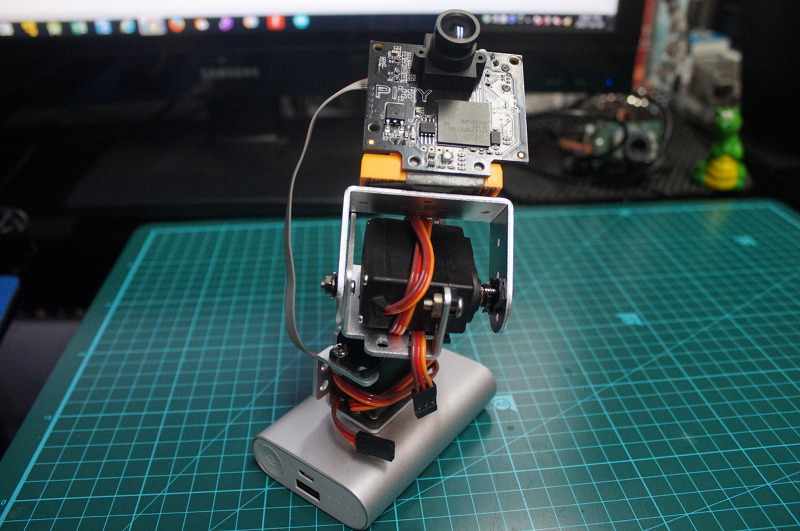
우선 첫번째 스텝으로 2축으로 제어가 가능한 서보모터 마운트를 만들고 서보모터를 제어하는 것인데요, 이미 언젠가 사용하겠지 싶어서 구입해 둔 2축 서보모터 마운트가 있기에 이 부분은 간단히 해결될 거라 생각했습니다.
바로 중국에서 구입한 이런 제품이죠.
9g 서보모터를 이용하여 바로 연결이 가능하도록 나온 제품이고 약간 헷갈리기는 하지만 조립이 어렵지는 않습니다.
그런데 너무 쉽게 생각한게 오산이었을까요?
일단 어떻게 연결해도 약간 제가 생각하는 머리의 움직임과 괴리감이 있었습니다.
사람은 목이라는 놀라운 구조에 의해 상하좌우 회전이 거의 동일한 한 점에서 이루어 집니다. 심지어는 틸트까지 되죠, 3축이 하나의 구조에서 이루어지는 놀라운 구조가 아닐수 없습니다.
제가 구입하였던 2축 서보 마운트는 그런 개념에서 완전히 빗나가 있더군요. 일단 x, y 축의 회전 축이 상당히 어긋나 있다는 점이 첫번째 문제점이었고 두번째로는 기본 각도가 수평에서 시작한다는 점 이었습니다.
위의 사진에서 보이는 것처럼 상단 평평한 면이 이미 최대 상향(y축) 각도인데요, 말하자면 더이상 고개를 들거나 또는 내리는건 불가능한 상태 입니다. 물론 90도를 꺽은 상태에서 카메라를 부착하는 방법도 있지만 그렇게 되면 축에서 더욱 멀어지게 되므로 이미 상당한 수준의 거북목이 진행된 것처럼 되어 버립니다. 무슨 목을 쭉 앞으로 뺀 거북이처럼 회전이 되게 되는 것이죠.
세번째 문제는 전체 부품의 부피가 너무 크다는 것인데요, RC 카 운전석 안에 장착을 해야 하는데 이런 저런 부품이 너무 자리를 많이 차지하더군요, 음…
2축 서보 연결을 위한 브라켓 제작하기
그래서 아주 간단한 구조에 부피도 아주 작은 2축 회전축을 만들어 보기로 하였습니다.
제 포스트를 보시는 분도 제가 만든 것처럼 구현하시면 축의 위치를 거의 같은 선상에 두고 사람의 머리처럼 제어되는 축을 만드실 수 있을 거에요.
서보모터2개를 연결해주는 부품 제작 최종 회전각도를 고려하여 수정
저는 3D 프린터를 이용하여 핵심 부품을 출력하였습니다만, 구조상 그냥 L 자 꺽쇠를 이용하여 만드시는 것도 가능합니다. 필요하신 크기로 가공만 하면 되는 것이죠.
프린팅 중
저는 부품의 부피를 최소화 하기 위하여 서보모터의 고정 부품 안쪽으로 브라켓이 장착되도록 제작을 하였습니다.
출력된 프린트 물에 서보모터 부작을 위한 부품 장착
9g 서보모터에 부착된 상태 다른각도에서 본 모습
이렇게 되면 상단의 서보모터는 Y 축(상하회전)을 제어하고 하단의 서보모터는 X 축(좌우회전)을 제어하게 되는데요, 우리의 목의 구조를 봐도 보통 회전은 귀를 중심으로 머리통이 상하로 움직이고 좌우 회전은 목 전체가 회전되므로 상대적으로 제가 만든것과 유사한 구조로 움직이는 것을 알 수 있습니다. 물론 사람의 목은 대단히 유연하고 훌륭한 관절이어서 상하회전이 꼭 한군데서 이루어지는 것은 아닙니다만 유사한 움직임이 구현되기는 합니다.
제가 만든 것처럼 브라켓의 상하 길이를 작게 만들게 되면 상하 회전 움직임에 제약이 있기는 합니다. 서보모터에 부딪힐 수 있기 때문인데요, 사람의 목이 상하로 180도를 움직이지 않는 것을 고려해보면 크게 문제될 것은 없어 보입니다.
만약 서보모터의 동작 범위 전체를 커버하기를 원하시면 브라켓의 상하 길이를 서보모터의 회전 반경보다 크게 제작하면 문제 없이 동작하게 됩니다.
아두이노와 연결을 해보자
자 이제 아두이노로 잘 제어가 되는지 확인해 보도록 하겠습니다.
2축 제어를 위하여 간단하게 2축 아날로그 조이스틱을 연결하고 제어를 해봅니다.
연결은 아래와 같이 하시면 됩니다.
소스코드는 아주 간단합니다.
아날로그 신호를 받아 서보모터를 움직이는 기본 소스코드 그대로 약간만 응용하면 구현이 가능합니다.
다만 저처럼 상하 움직임에 제한이 있는 경우는 서보로 가는 신호에 제한을 주어야 합니다.
#include
Servo myservo_LR; // streering servo Servo myservo_UD; // 2speed gear box servo int pin_servo_LR = 9; int pin_servo_UD = 10; int pin_x = A3; int pin_y = A4; int angle_x = 512 ; int angle_y = 512 ; void setup() { myservo_LR.attach(pin_servo_LR); myservo_LR.write (90); myservo_UD.attach(pin_servo_UD); myservo_UD.write (90); } void loop() { angle_x = analogRead(pin_x); angle_y = analogRead(pin_y); angle_x = map(angle_x, 0, 1024, 30, 150); angle_y = map(angle_y, 0, 1024, 60, 120); myservo_LR.write (angle_x); myservo_UD.write (angle_y); delay(10); } 90도를 기준 각도로 하여 상하는 60~120도, 좌우는 30~150도의 움직임을 범위로 하였습니다.
자 이제 테스트를 해볼까요?
잘 동작하네요.
일단 첫번째 관문은 통과한 셈 입니다.
다음 편에는 mp6050 을 이용하여 회전한 각도 만큼 서보모터를 움직이는 방법을 알아보도록 하겠습니다.
아래 링크된 글을 이용하여 바로 보실 수 있습니다.
그럼 이만~
2022.01.31 – [DIY/Arduino] – [아두이노]mpu6050 을 이용하여 2축 서보모터 제어하기
2022.01.31 – [DIY/Arduino] – [아두이노]NRF24L01을 이용하여 무선으로 mpu6050 신호 전달하기
2020.06.29 – [DIY/Arduino] – C# 에서 아두이노로 시리얼 통신 하기
2020.10.28 – [DIY/Arduino] – 아두이노로 아이방 스탠드 개조하기 – 자동 꺼짐 기능
아두이노 서보모터 제어(심화)
1. 기존 원킹쌤의 서보모터 교육 자료 복습
https://ai0.kr/3
2. 1개의 서브모터를 블루투스랑 연결해 보자.
– 위 자료를 참고해서 앱인벤터로 제작한 자체 앱으로 블루투스 – 서브모터를 제어하시오.
3. 2개의 서보모터를 블루투스로 연결해 보자.
– 위 자료와 [2]번 자료를 참고하여, 자체제작 앱인벤터 앱으로 2개의 서브모터를 제어해보시오.
– 레이저 모듈이 아직 배송중이오니, 일단은 적색 led로 대체
– 자체제작 앱 인벤터에도 led 제어 버튼을 추가하시오
-> 켜짐, 꺼짐, 점멸
– 3d 프린트 전에 아이소 핑크로 프로토 타입을 제작하시오.
[추가 과제 – 블루투스로 서보모터 2개 제어하기.]1. 회
로
2. 아두이노 코드
#include
//블루투스 시리얼 통신 라이브러리 추가 #include SoftwareSerial BTSerial(3, 2); //블루투스 설정 BTSerial(Tx, Rx) Servo servomotor1; Servo servomotor2; int b = 0; int c = 0; int Yellow = 7; int Red = 9; //led 핀 설정 void setup() { BTSerial.begin(9600); //블루투스 통신 시작 servomotor1.attach(9); // 9번핀에 서보모터1 연결 servomotor2.attach(8); // 8번핀에 서보모터2 연결 pinMode(Red, OUTPUT); pinMode(Yellow, OUTPUT); Serial.begin(9600); } void loop() { if(BTSerial.available()) //값이 들어오면 { char bt; //제어할 변수 bt선언 bt = BTSerial.read(); //들어온 값을 bt에 저장 Serial.println(bt); if(bt == ‘1’){ //bt가 1면 위로 if(b<180){b = b+10;} servomotor1.write(b); // 9번핀에 서보모터1 연결 } else if(bt == '2'){ //bt가 2면 아래로 if(b>0){b = b-10;} servomotor1.write(b); } else if(bt == ‘3’){ //bt가 3면 우로 if(c<180){c = c+10;} servomotor2.write(c); } else if(bt == '4'){ //bt가 4면 좌로 if(c>0){c = c-10;} servomotor2.write(c); } else if(bt == ‘0’){ //bt가 0면 중앙 servomotor1.write(90); servomotor2.write(90); b=90; c=90; } else if(bt == ‘o’) digitalWrite(Yellow, HIGH); else if(bt == ‘f’) digitalWrite(Yellow, LOW); } delay(100); } 3. 블루트스 어플 제작
-> 아래 2가지 방법 중 하나 선택하여 실행
1) 앱 인벤터로 직접 제작 : 1, 2, 3, 4 등등 신호를 보내 아두이노 에게 송신
2) 기존 앱 다운(아두이노 rc 리모콘) 하여 아두이노에게 블루투스 신호 송신
[최종 과제] 블루투스 + DC 모터 2개 + 서보모터 2개 + led1. 아두이노 회로
2. 아두이노 코드
#include
//블루투스 시리얼 통신 라이브러리 추가 #include SoftwareSerial BTSerial(3, 2); //블루투스 설정 BTSerial(Tx, Rx) //모터 PIN 설정 #define LEFT_A1 8 //왼쪽 바퀴 #define LEFT_B1 9 //왼쪽 바퀴 #define RIGHT_A2 10 //오른쪽 바퀴 #define RIGHT_B2 11 //오른쪽 바퀴 const int ENA = 7; const int ENB = 12; //서브모터 설정 Servo servomotor1; Servo servomotor2; int b = 0; int c = 0; int Yellow = 4; //led 핀 설정 void setup() { BTSerial.begin(9600); //블루투스 통신 시작 servomotor1.attach(6); // 6번핀에 서보모터1 연결 servomotor2.attach(5); // 5번핀에 서보모터2 연결 pinMode(Yellow, OUTPUT); // led 노랑 Serial.begin(9600); // 시리얼모니터 pinMode(LEFT_A1, OUTPUT); pinMode(RIGHT_A2, OUTPUT); pinMode(LEFT_B1, OUTPUT); pinMode(RIGHT_B2, OUTPUT); Serial.println(“Arduino Bluetooth Car is ready to start”); } void loop() { if(BTSerial.available()) //값이 들어오면 { char bt; //제어할 변수 bt선언 bt = BTSerial.read(); //들어온 값을 bt에 저장 Serial.println(bt); if(bt == ‘1’){ //bt가 1면 위로 if(b<180){b = b+10;} servomotor1.write(b); // 9번핀에 서보모터1 연결 } else if(bt == '2'){ //bt가 2면 아래로 if(b>0){b = b-10;} servomotor1.write(b); } else if(bt == ‘3’){ //bt가 3면 우로 if(c<180){c = c+10;} servomotor2.write(c); } else if(bt == '4'){ //bt가 4면 좌로 if(c>0){c = c-10;} servomotor2.write(c); } else if(bt == ‘0’){ //bt가 0면 중앙 servomotor1.write(90); servomotor2.write(90); b=90; c=90; } else if(bt == ‘o’){digitalWrite(Yellow, HIGH);} else if(bt == ‘g’){digitalWrite(Yellow, LOW);} // dc모터 코드 else if(bt == ‘l’){ //좌회전(강) Serial.println(“left”); left(); }else if(bt == ‘r’){ //우회전(강) Serial.println(“right”); right(); }else if(bt == ‘f’){ //전진 Serial.println(“forward”); forward(); }else if(bt == ‘b’){ //후진 Serial.println(“backward”); backward(); }else if(bt == ‘w’){ //우회전(약) Serial.println(“slow right”); sRight(); }else if(bt == ‘q’){ //좌회전(약) Serial.println(“slow left”); sLeft(); }else if(bt == ‘c’){ //우회전(뒷) Serial.println(“back right”); bRight(); }else if(bt == ‘z’){ //좌회전(뒷) Serial.println(“back left”); bLeft(); }else if(bt == ‘s’){ //정지 Serial.println(“stop”); stop(); } } delay(100); } // 자동차 움직임 정의 Function 들 void forward(){ digitalWrite(LEFT_A1, HIGH); digitalWrite(LEFT_B1, LOW); digitalWrite(RIGHT_A2, HIGH); digitalWrite(RIGHT_B2, LOW); analogWrite(ENB, 255); analogWrite(ENA, 255); } void backward(){ digitalWrite(LEFT_A1, LOW); digitalWrite(LEFT_B1, HIGH); digitalWrite(RIGHT_A2, LOW); digitalWrite(RIGHT_B2, HIGH); analogWrite(ENB, 255); analogWrite(ENA, 255); } void left(){ digitalWrite(LEFT_A1, LOW); digitalWrite(LEFT_B1, HIGH); digitalWrite(RIGHT_A2, HIGH); digitalWrite(RIGHT_B2, LOW); analogWrite(ENB, 255); analogWrite(ENA, 255); } void right(){ digitalWrite(LEFT_A1, HIGH); digitalWrite(LEFT_B1, LOW); digitalWrite(RIGHT_A2, LOW); digitalWrite(RIGHT_B2, HIGH); analogWrite(ENB, 255); analogWrite(ENA, 255); } void sLeft(){ digitalWrite(LEFT_A1, LOW); digitalWrite(LEFT_B1, LOW); digitalWrite(RIGHT_A2, HIGH); digitalWrite(RIGHT_B2, LOW); analogWrite(ENB, 255); analogWrite(ENA, 255); } void bLeft(){ digitalWrite(LEFT_A1, LOW); digitalWrite(LEFT_B1, LOW); digitalWrite(RIGHT_A2, LOW); digitalWrite(RIGHT_B2, HIGH); analogWrite(ENB, 255); analogWrite(ENA, 255); } void sRight(){ digitalWrite(LEFT_A1, HIGH); digitalWrite(LEFT_B1, LOW); digitalWrite(RIGHT_A2, LOW); digitalWrite(RIGHT_B2, LOW); analogWrite(ENB, 255); analogWrite(ENA, 255); } void bRight(){ digitalWrite(LEFT_A1, LOW); digitalWrite(LEFT_B1, HIGH); digitalWrite(RIGHT_A2, LOW); digitalWrite(RIGHT_B2, LOW); analogWrite(ENB, 255); analogWrite(ENA, 255); } void stop(){ digitalWrite(LEFT_A1, LOW); digitalWrite(LEFT_B1, LOW); digitalWrite(RIGHT_A2, LOW); digitalWrite(RIGHT_B2, LOW); } 3. 앱인벤터 설계
1) 앱 화면 그래픽
2) 앱 블록 코딩
끝.
So you have finished reading the 아두 이노 서보 모터 2 개 제어 topic article, if you find this article useful, please share it. Thank you very much. See more: 아두이노 서보모터 영점, 아두이노 서보모터 응용, 아두이노 서보모터 LED, 아두이노 서브 모터, 모터 각도 제어, 서보모터 역 회전, 서보모터 전류