
You are looking for information, articles, knowledge about the topic nail salons open on sunday near me can 통신 소스 코드 on Google, you do not find the information you need! Here are the best content compiled and compiled by the https://chewathai27.com/to team, along with other related topics such as: can 통신 소스 코드 C CAN 통신 예제, 아두이노 can 통신 예제, STM32 CAN 통신 예제, Linux CAN 통신 예제, CAN 통신 프로토콜, Python-CAN 통신, CAN 통신 TX, RX, CAN 통신 ID
[Raspberry] CAN 통신 프로그래밍 #3/3 – Open Embedded Club
- Article author: makeutil.tistory.com
- Reviews from users: 237
 Ratings
Ratings - Top rated: 3.5
- Lowest rated: 1
- Summary of article content: Articles about [Raspberry] CAN 통신 프로그래밍 #3/3 – Open Embedded Club 예제코드는 아래와 같다. 아래의 소스코드는 CAN을 통해서 네트워크로 데이터를 보내는 예제이다. 이때 can_frame에 를 넣어준다. 동일한 네트워크의 각 … …
- Most searched keywords: Whether you are looking for [Raspberry] CAN 통신 프로그래밍 #3/3 – Open Embedded Club 예제코드는 아래와 같다. 아래의 소스코드는 CAN을 통해서 네트워크로 데이터를 보내는 예제이다. 이때 can_frame에 를 넣어준다. 동일한 네트워크의 각 … [목차] ① CAN통신 프로그래밍 1/3 – https://makeutil.tistory.com/93 – CAN 통신 개요 ② CAN통신 프로그래밍 2/3 – https://makeutil.tistory.com/94 – 라즈베리파이에서 CAN 장치 설정 ③ CAN통신..
- Table of Contents:
![[Raspberry] CAN 통신 프로그래밍 #3/3 - Open Embedded Club](https://img1.daumcdn.net/thumb/R800x0/?scode=mtistory2&fname=https%3A%2F%2Fblog.kakaocdn.net%2Fdn%2Fu1Q27%2FbtrARpqf9nw%2Fh3imR3KEGlN3vgBoA1jPkk%2Fimg.png)
CAN통신 강의 : 네이버 블로그
- Article author: m.blog.naver.com
- Reviews from users: 17816 Ratings
- Top rated: 4.7
- Lowest rated: 1
- Summary of article content: Articles about CAN통신 강의 : 네이버 블로그 자동차와 관련된 CAN 이외의 통신방식이 존재하지만 … CAN 통신을 이용하여 eclipse Java코드로 연결된 CAN장비로부터 데이터를 받아봅시다. …
- Most searched keywords: Whether you are looking for CAN통신 강의 : 네이버 블로그 자동차와 관련된 CAN 이외의 통신방식이 존재하지만 … CAN 통신을 이용하여 eclipse Java코드로 연결된 CAN장비로부터 데이터를 받아봅시다.
- Table of Contents:
카테고리 이동
ehdwnd02님의블로그
이 블로그
CAN 통신
카테고리 글
카테고리
이 블로그
CAN 통신
카테고리 글
졸작
- Article author: blog.daum.net
- Reviews from users: 17174 Ratings
- Top rated: 3.7
- Lowest rated: 1
- Summary of article content: Articles about 졸작 자동차과 학생들의 CAN통신 실습을 위한 쉬운 예제입니다. ECU1에서 엔진RPM을 계측하여 ECU2로 RPM 데이터를 송신하면 ECU2에서 수신하여 정확히 … …
- Most searched keywords: Whether you are looking for 졸작 자동차과 학생들의 CAN통신 실습을 위한 쉬운 예제입니다. ECU1에서 엔진RPM을 계측하여 ECU2로 RPM 데이터를 송신하면 ECU2에서 수신하여 정확히 … 자동차과 학생들의 CAN통신 실습을 위한 쉬운 예제입니다. ECU1에서 엔진RPM을 계측하여 ECU2로 RPM 데이터를 송신하면 ECU2에서 수신하여 정확히 수신했음을 LED의 점등으로 표시한다. RPM 송신 프..졸작졸작
- Table of Contents:

[강의] STM32F4 – CAN 통신
- Article author: louie0724.tistory.com
- Reviews from users: 41940 Ratings
- Top rated: 3.4
- Lowest rated: 1
- Summary of article content: Articles about [강의] STM32F4 – CAN 통신 1. CAN 통신 설명. – 캔통신은 여러대의 장치와 두개의 선만으로 통신가능하며 에러처리까지 가능함. – CAN HIGH CAN LOW … …
- Most searched keywords: Whether you are looking for [강의] STM32F4 – CAN 통신 1. CAN 통신 설명. – 캔통신은 여러대의 장치와 두개의 선만으로 통신가능하며 에러처리까지 가능함. – CAN HIGH CAN LOW … 작성일: 21년 1월 10일 수정일: 21년 6월 1일 – STM32 CAN 통신 설정 내용 추가 Index 1. CAN 통신 설명 2. CAN 통신 설정 3. 프로그래밍 1. CAN 통신 설명 – 캔통신은 여러대의 장치와 두개의 선만으로 통신가..
- Table of Contents:
Louie NRT Story
[강의] STM32F4 – CAN 통신 본문티스토리툴바
![[강의] STM32F4 - CAN 통신](https://img1.daumcdn.net/thumb/R800x0/?scode=mtistory2&fname=https%3A%2F%2Fblog.kakaocdn.net%2Fdn%2FvQaaI%2FbtqP4lGWjhk%2FNJQkD1Ox0MSyXtHOaKqe8k%2Fimg.png)
can 통신 소스 코드
- Article author: realsys.co.kr
- Reviews from users: 29273 Ratings
- Top rated: 3.2
- Lowest rated: 1
- Summary of article content: Articles about can 통신 소스 코드 목표: 이번 강좌에서는 STM32F 내부의 CAN 통신에 대해서 다루어봅니다 … DLC (Data Length Code) : 데이터 프레임의 데이터 바이트 수, … …
- Most searched keywords: Whether you are looking for can 통신 소스 코드 목표: 이번 강좌에서는 STM32F 내부의 CAN 통신에 대해서 다루어봅니다 … DLC (Data Length Code) : 데이터 프레임의 데이터 바이트 수, …
- Table of Contents:
can 통신 소스 코드
- Article author: www.eskorea.net
- Reviews from users: 39972 Ratings
- Top rated: 3.8
- Lowest rated: 1
- Summary of article content: Articles about can 통신 소스 코드 이때, PC에서 전송 Order가 발생하면, CAN 데이터를 전송합니다. … 또한, 데이터의 신빙성과 설정을 위해 아래와 같이 통신 데이터 Protocol을 적용하였습니다. …
- Most searched keywords: Whether you are looking for can 통신 소스 코드 이때, PC에서 전송 Order가 발생하면, CAN 데이터를 전송합니다. … 또한, 데이터의 신빙성과 설정을 위해 아래와 같이 통신 데이터 Protocol을 적용하였습니다.
- Table of Contents:
CAN OBDII 통신 관련 링크 & 파일 모음
- Article author: developer-eun-diary.tistory.com
- Reviews from users: 12360 Ratings
- Top rated: 3.2
- Lowest rated: 1
- Summary of article content: Articles about CAN OBDII 통신 관련 링크 & 파일 모음 1. 28. CAN통신 MCP2515 Mask와 Filter CAN 통신으로 자동차와의 통신을 구현하려고 하는데.. 예제 코드 … …
- Most searched keywords: Whether you are looking for CAN OBDII 통신 관련 링크 & 파일 모음 1. 28. CAN통신 MCP2515 Mask와 Filter CAN 통신으로 자동차와의 통신을 구현하려고 하는데.. 예제 코드 … CAN 통신을 개발하면서 정보가 너무 없어서 힘들었다😭 개발하면서 찾은 CAN 통신 관련 링크와 pdf를 첨부하니 다른 분들은 레퍼런스 찾는데 너무 많은 시간을 쏟지 않길… https://en.wikipedia.org/wiki/OBD-II..
- Table of Contents:
태그
관련글
댓글0
전체 방문자
티스토리툴바
[임베디드] CAN 통신이란?
- Article author: dbstndi6316.tistory.com
- Reviews from users: 8748 Ratings
- Top rated: 4.1
- Lowest rated: 1
- Summary of article content: Articles about [임베디드] CAN 통신이란? CAN 통신과 RS-232 시리얼통신, 이더넷, TCP 까지 연재할 생각이다. CAN 통신은 보쉬 사에서 개발하고 ISO11898-1 표준으로 코드화한 차량용 네트워크 … …
- Most searched keywords: Whether you are looking for [임베디드] CAN 통신이란? CAN 통신과 RS-232 시리얼통신, 이더넷, TCP 까지 연재할 생각이다. CAN 통신은 보쉬 사에서 개발하고 ISO11898-1 표준으로 코드화한 차량용 네트워크 … 가장 기본적인 통신방법을 짚어보려 한다. CAN 통신과 RS-232 시리얼통신, 이더넷, TCP 까지 연재할 생각이다. CAN 통신은 보쉬 사에서 개발하고 ISO11898-1 표준으로 코드화한 차량용 네트워크 통신 방식이다. CA..
- Table of Contents:
태그
관련글
댓글0
공지사항
최근글
인기글
최근댓글
전체 방문자
티스토리툴바
![[임베디드] CAN 통신이란?](https://img1.daumcdn.net/thumb/R800x0/?scode=mtistory2&fname=https%3A%2F%2Fblog.kakaocdn.net%2Fdn%2FckFMsG%2Fbtrd5DRGU2U%2FHn2xxK6O0834kT6aCSH2M1%2Fimg.png)
can 통신 소스 코드
- Article author: www.infineon.com
- Reviews from users: 37725 Ratings
- Top rated: 4.1
- Lowest rated: 1
- Summary of article content: Articles about can 통신 소스 코드 CAN 통신은 어드레스를 기반으로 하는 것이 아닌 메시지를 기반으로 한 것이다 … This Source Code (software and/or firmware) is owned by Cypress Semiconductor … …
- Most searched keywords: Whether you are looking for can 통신 소스 코드 CAN 통신은 어드레스를 기반으로 하는 것이 아닌 메시지를 기반으로 한 것이다 … This Source Code (software and/or firmware) is owned by Cypress Semiconductor …
- Table of Contents:
AUTOSAR CAN
- Article author: www.autoelectronics.co.kr
- Reviews from users: 14771 Ratings
- Top rated: 4.4
- Lowest rated: 1
- Summary of article content: Articles about AUTOSAR CAN AUTOSAR 3.0 기반의 CAN, FlexRay 통신을 적용한 실제 차량의 공개 시범 주행도 실시했다 … ①번부터 ③번까지 단계를 거쳐 1개의 ECU에 대한 소스 코드가 생성된다. …
- Most searched keywords: Whether you are looking for AUTOSAR CAN AUTOSAR 3.0 기반의 CAN, FlexRay 통신을 적용한 실제 차량의 공개 시범 주행도 실시했다 … ①번부터 ③번까지 단계를 거쳐 1개의 ECU에 대한 소스 코드가 생성된다. AUTOSAR CAN
- Table of Contents:
See more articles in the same category here: https://chewathai27.com/to/blog.
[Raspberry] CAN 통신 프로그래밍 #3/3
반응형
[목차]① CAN통신 프로그래밍 1/3 – https://makeutil.tistory.com/93 – CAN 통신 개요
② CAN통신 프로그래밍 2/3 – https://makeutil.tistory.com/94 – 라즈베리파이에서 CAN 장치 설정
③ CAN통신 프로그래밍 3/3 – https://makeutil.tistory.com/95 – CAN 통신 샘플코드
일반적으로 리눅스의 경우 CAN통신을 위한 다양한 라이브러리가 포함되어있거나 또는 포함할 수 있다. 이번에는 이미 공개된 CAN 통신코드를 일부 수정하여 만든 CAN 데이터 전송 예제이다.
1. CAN 통신 예제코드
CAN 이론설명때 CAN도 ISO레이어를 사용한다고 언급했다. 리눅스에서 CAN은 네트워크로 인식된다. 라즈베리파이 설정에서 네트워크 장치 명령으로 확인한 것이 기억이 나야한다. 결론적으로 리눅스에서 CAN은 네트워크 프로그래밍을로 통신이 가능하다는 것이므로 Socket통신을 이용하여 통신한다.
예제코드는 아래와 같다. 아래의 소스코드는 CAN을 통해서 네트워크로 데이터를 보내는 예제이다. 이때 can_frame에 id를 넣어준다. 동일한 네트워크의 각 CAN장치는 각 모듈의 ID와 맞는 데이터만 취하도록 구성되어있다. 그리고 보내고자하는 패킷(데이터)길이를 넣어준 다음부터 나머지는 애플리케이션에서 필요한 정보를 넣어준다.
1.1. C기반 CAN Example
C의 라이브리의 함수를 이용하여 만들 수 있는 샘플 코드이다.
ex) gcc -o can_ex1 can_ex1.c
/* RaspberryPi 4 for Automotive IoT Kit * TITLE : C Based Example for CAN * File : can_ex1.c * Auth : wikipedia.org * Ment : Original Soruce – http://en.wikipedia.org/wiki/SocketCAN */ #include
#include #include #include #include #include #include #include #include #include int main(void) { int s; int nbytes; struct sockaddr_can addr; struct can_frame frame; struct ifreq ifr; const char *ifname = “vcan0”; if ((s = socket(PF_CAN, SOCK_RAW, CAN_RAW)) == -1) { perror(“Error while opening socket”); return -1; } strcpy(ifr.ifr_name, ifname); ioctl(s, SIOCGIFINDEX, &ifr); addr.can_family = AF_CAN; addr.can_ifindex = ifr.ifr_ifindex; printf(“%s at index %d “, ifname, ifr.ifr_ifindex); if (bind(s, (struct sockaddr *)&addr, sizeof(addr)) == -1) { perror(“Error in socket bind”); return -2; } frame.can_id = 0x10; frame.can_dlc = 8; frame.data[0] = 0x11; frame.data[1] = 0x22; frame.data[2] = 0x33; frame.data[3] = 0x44; frame.data[4] = 0x55; frame.data[5] = 0x66; frame.data[6] = 0x77; frame.data[7] = 0x88; nbytes = write(s, &frame, sizeof(struct can_frame)); printf(“Wrote %d bytes
“, nbytes); return 0; }
1.2. CPP 기반의 샘플코드
생긴건 C처럼 보이지만 내부에서 사용하는 부분이 g++의 라이브러리를 이용한다. 이런경우 g++로 빌드하여야 한다.
ex) g++ can_ex1 can_ex1.cpp
/* CAN 통신 예제 코드 AUTH : mkdev.co.kr */ #include
#include #include #include #include #include #include #include #include #include #include int main(int argc, char** argv) { int can_fd; struct sockaddr_can can_addr; struct can_frame can_frame; struct ifreq can_ifr; const char* can_dev = “can0”; // 하드웨어 이용시. //const char *can_dev = “vcan0”; // 가상 장치 이용시. strcpy(can_ifr.ifr_name, can_dev); ioctl(can_fd, SIOCGIFINDEX, &can_ifr); can_addr.can_family = AF_CAN; can_addr.can_ifindex = can_ifr.ifr_ifindex; fcntl(can_fd, F_SETFL, O_NONBLOCK); if(bind(can_fd, reinterpret_cast (&can_addr), sizeof(can_addr)) < 0) { printf("Binding Error! "); exit(1); } can_frame.can_id = 0x100; // CAN ID can_frame.can_dlc = 8; // 데이터 길이 can_frame.data[0] = 0x31; // 데이터 0~7 (8Byte) can_frame.data[1] = 0x32; can_frame.data[2] = 0x33; can_frame.data[3] = 0x34; can_frame.data[4] = 0x35; can_frame.data[5] = 0x36; can_frame.data[6] = 0x37; can_frame.data[7] = 0x38; ssize_t nbytes = write(can_fd, &can_frame, sizeof(struct can_frame)); // 전송 if(nbytes<1) { printf("Send Error! "); return -1; } close(can_fd); return 0; } 어떤가 네트워크 프로그래밍과 동일하지 않은가? 다른 부분은 socket 설정시 AF_CAN이라던지 CAN에 특화된 내용을 포함하고 있다. 기타 하드웨어 초기화등과 관련된 내용은 CAN모듈의 데이터 시트를 참고하기 바란다. 아쉽게도 본문을 작성하는 이 시점에서 장비를 사용할 수 없어 결과는 생략하지만 설정이 제대로 되어있다면 분명 정상적으로 구동된다. 더 자세한 내용이 필요한 독자는 구글에서 can programming으로 검색하면, 필자가 참조한 설명과 문서코드가 포함된 소스를 다운로드 받을 수 있다. 어렵지도 않거니와 별도로 책자가 없는 관계로 해당 문서를 보면 좀더 코딩에 도움이 될 거라 생각하면서 마친다. # 라즈베리파이 CAN 통신.... 끝. 반응형
CAN통신 강의
CAN (Controller Area Network)
: 우리가 일반적으로 사용하는 LAN(Local Area Network)
환경이 아닌 구조적으로 다른 Netwrok 환경
1986년도 메르세데스 벤츠에서 로베르트 보쉬사에게
의뢰를 해요
=> 3개의 ECU가 통신을 할 수 있는 네트워크 구조를
만들어봐!!
– 1986년에 보쉬사가 만들어서 자동차기술자 협회에서
발표
– 1991년 CAN 2.0이 발표
– 1992년 메르세데스 벤츠에서 CAN을 채택한 자동차
출시.
– 1993년 ISO에 의해서 표준화.
ECU : Electronic Control Unit(전자적 제어장치)
자동차에 들어있는 ECU를 간단하게 살펴보면,
– ACU(Airbag Control Unit)
– BCM(Body Control Module)
– ECU(Engine Control Unit)
– TCU(Trasmission Control Unit)
– ABS(Anit-lock Breaking System)
Genesis : 70개 ECU가 들어가 있구요
벤츠, BMW : 80개 ECU가 들어가 있구요
렉서스: 100개 이상 ECU가 들어가 있구요
================================================================
CAN은 어떤 방식으로 데이터 통신을 하나요?
=>
ECU간의 데이터 통신은 어떻게 하나요?
-> 기본적으로 각 ECU를 선으로 연결하는 방식은
좋지 않아요.
IO단자가 많이 필요하고 소형화하는데 문제가 생겨요.
비용도 많이 발생해요!
=> 그래서 다른 방식으로 통신해요
직렬(Serial) 통신을 해요! 각각의 ECU를 서로
직접 연결시키는게 아니라 BUS 개념을 도입.
CAN은 CAN BUS에 대한 단일 입출력 interface만
가지고 있는 것이 특징.
직렬통신 vs 병렬통신
우리가 사용하는 대표적인 직렬통신 방식의 기기는
=> USB, 컴퓨터의 COM 포트를 이용한 통신
=> 자동차는 기본적으로 네트워크 환경이 굉장히 열악한
환경이예요. 온도, 충격, 진동이 많은 환경이라서
네트워크 통신할 때 오류가 발생할 여지가 많아요.
자동차와 관련된 CAN 이외의 통신방식이 존재하지만
CAN이 대표적으로 많이 사용되고 언급되는 이유는
안정성에 있어요!!
======================================================================
CAN의 장점
– CAN은 Multi Master 통신을 해요!
=> 서버와 클라이언트가 존재하지 않아요!
모든 ECU가 CAN BUS가 idle하다면 스스로
데이터를 CAN BUS를 통해서 보낼 수 있어요!
– 노이즈에 매우 강해요
=> 차량 자체가 매우 열악한 환경인데 CAN은 두가닥의
꼬인 전선을 이용하여 전선의 전압차를 통해
데이터를 전송하는 방식.
– 표준 프로토콜
=> 시장성이 확보될 수 있어요.
– 하드웨어적으로 오류보정이 가능해요
=> CRC를 하드웨어적으로 만들어서 전송. 받는 측에서
CRC를 이용하여 데이터 프레임의 오류가 있는지를
확인. 만약 오류가 있으면 응답을 보내요. 해당
응답을 확인해서 재전송을 하게 되요!
– 다양한 통신방식을 지원
=> Broadcast, Multicast, Unicast를 다 지원
통신방식이 address를 기반으로 통신하는 방식이
아니예요.
– ECU간에는 우선순위가 존재
각 ECU는 고유의 ID가 존재하는데 이 ID값이 작을 수록
우선순위가 높아요! 이 우선순위를 이용하면 급한
message를 먼저 처리할 수 있어요!
– CAN BUS 라는 것을 사용
=> 전선의 양을 줄일 수 있어요. => 비용절감의 효과
============================================================================
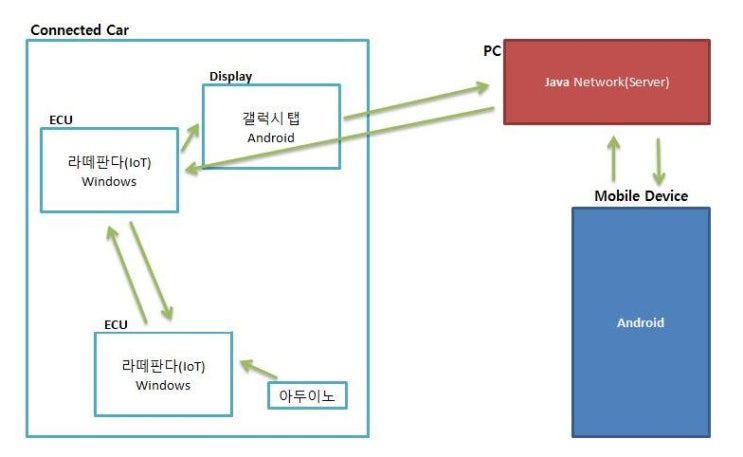
프로젝트를 어떤 것을 할건가?
간단한 시나리오를 설명.
–핸드폰으로 차 도어 오픈하는 예제–
자동차과 학생들의 CAN통신 실습을 위한 쉬운 예제입니다.
ECU1에서 엔진RPM을 계측하여 ECU2로 RPM 데이터를 송신하면
ECU2에서 수신하여 정확히 수신했음을 LED의 점등으로 표시한다.
RPM 송신 프로그램
// can_tx-rpm.c
#include
#include
#define sei() #asm(“sei”)
void init_can(void)
{
unsigned char num_channel, num_data;
CANGCON |= 0x01; //reset CAN
// Highest Interrupt Priority: MOb0
CANHPMOB=0x00;
// CAN System Clock: 11059200 Hz 125 kbps
CANBT1=0x14;
CANBT2=0x04;
CANBT3=0x13;
CANGCON=0x02;
/* reset all mailboxs */
for(num_channel = 0; num_channel < 15; num_channel++) { CANPAGE = num_channel << 4; CANCDMOB = 0x00; //CH_DISABLE; CANSTMOB = 0; CANIDT1 = 0; CANIDT2 = 0; CANIDT3 = 0; CANIDT4 = 0; CANIDM1 = 0; CANIDM2 = 0; CANIDM3 = 0; CANIDM4 = 0; for(num_data =0; num_data < 8; num_data++) CANMSG=0; } /* Channel 0 init */ CANPAGE = (0 << 4); /*Channel 0: identifier = 11bits, CANIDT=0x123 */ CANIDT1 = 0x24; CANIDT2 = 0x60; CANIDT4 &= ~0x04; } void main(void) { char save_canpage; int rpm, rpm_tx; // char cnt=0; init_can(); do { save_canpage = CANPAGE; CANPAGE = (0 << 4); CANCDMOB = 0x00; //rpm신호 전송 , rpm=3000일 경우 rpm=1000; rpm_tx=rpm/50; CANMSG =rpm_tx ; CANCDMOB |= 8; CANCDMOB |= 0x40; CANSTMOB=0x00; CANPAGE = save_canpage; delay_ms(200); } while(1); } RPM 수신 프로그램 // can_rx-rpm.c , 제타 키트 #include
#include
void can_init(void)
{
char num_channel, num_data;
CANGCON |= 0x01; //reset CAN
// CAN Controller initialization
// MOb0: Enabled
CANEN2=0x01;
// Highest Interrupt Priority: MOb0
CANHPMOB=0x00;
// CAN System Clock: 11059200 Hz
// bit time: 125 kbps
CANBT1=0x14;
CANBT2=0x04;
CANBT3=0x13;
// CAN: On
CANGCON=0x02;
/* reset all mailboxs */
for(num_channel = 0; num_channel < 15; num_channel++) { CANPAGE = num_channel << 4; CANCDMOB = 0x00; //CH_DISABLE; CANSTMOB = 0; CANIDT1 = 0; CANIDT2 = 0; CANIDT3 = 0; CANIDT4 = 0; CANIDM1 = 0; CANIDM2 = 0; CANIDM3 = 0; CANIDM4 = 0; for(num_data =0; num_data < 8; num_data++) CANMSG=0; } /* Channel 0 init */ CANPAGE = (0 << 4); CANSTMOB = 0x00; CANCDMOB = 0x00; /*Channel 0: identifier = 11bits, CANIDT=0x123 */ CANIDT1 = 0x24; CANIDT2 = 0x60; CANIDM1 = 0x00; CANIDM2 = 0x00; CANIDM4 = 0x00; CANIDT4 &= ~(1 << 4); CANCDMOB |= 8; CANCDMOB |=0x80; CANIE2 |= 0x01; CANGIE |= 0x20; // CANGIE |= 0x10; CANGIE |= 0x80; CANGSTA = 0x04; } void main(void) { DDRC = 0xf0; can_init(); SREG |= 0x80; do { } while (1); } interrupt [CAN_IT] void can_interrupt(void) { char can_data[9]; char save_canpage; unsigned char can_i; unsigned int rpm; save_canpage = CANPAGE; CANPAGE = (0 << 4); if(CANSTMOB == 0x20) { for(can_i=0; can_i<8; can_i++) can_data[can_i] = CANMSG; can_data[can_i] = 0; } CANCDMOB = 0x00; CANCDMOB |= 8; CANCDMOB |= 0x80; CANEN2 |= (1 << 0); CANSTMOB = 0x00; CANPAGE = save_canpage; //rpm 수신후 출력 rpm=can_data[0]*50; if(rpm<1500)PORTC=0b11101111; else if((rpm>1500)&&(rpm<=2500))PORTC=0b11011111; else if((rpm>2500)&&(rpm<=3500))PORTC=0b10111111; else PORTC=0b01111111; //PORTC = ~can_data[0] << 4; } can_tx-rpm.c can_rx-rpm.c 출처 : 정태균의 ECU 튜닝 클럽 글쓴이 : 정태균 원글보기 : 정태균 메모 :
So you have finished reading the can 통신 소스 코드 topic article, if you find this article useful, please share it. Thank you very much. See more: C CAN 통신 예제, 아두이노 can 통신 예제, STM32 CAN 통신 예제, Linux CAN 통신 예제, CAN 통신 프로토콜, Python-CAN 통신, CAN 통신 TX, RX, CAN 통신 ID